Датчики лазерного излучения
Высокоскоростное измерение лазерного излучения высокой мощности
Б. Ньюманн, С. Райт Artifex Engineering, Германия
* Статья опубликована в журнале Фотоника № 1 / 69 / 2018
ФУНКЦИОНАЛЬНОСТЬ ОПРЕДЕЛЯЮТ ДАТЧИКИ
Измерение оптической мощности лазерного излучения основано на использовании датчиков, преобразующих оптическую мощность в измеряемое напряжение или силу тока. Физические принципы, заложенные в основу работы датчика, определяют функциональность всего измерительного устройства. Для измерения мощности лазерного излучения используют два типа стандартных датчиков:
| Тип датчика | Физические принципы | Описание |
|---|---|---|
| Фотодиод | Электронно-дырочная генерация | Генерация неравновесных электронно-дырочных пар происходит вследствие поглощения фотонов в полупроводниковом материале. Внешняя электрическая цепь, подключенная к устройству, обеспечивает циркуляцию тока неравновесных носителей заряда в системе. Величина тока пропорциональна поглощенной оптической мощности. |
| Термопара | Эффект Зеебека | Устройство, изготовленное с использованием двух различных металлов, соединенных между собой в двух отдельных точках. Вследствие разности температур между этими точками возникает напряжение. Такое устройство называется «термопара». |
СЕНСОРЫ НА ОСНОВЕ ТЕРМОПАРЫ
Термоэлемент представляет собой датчик, состоящий из массива термопар. Отдельные термопары соединены термически параллельно, но в электрической цепи они представляют собой последовательное соединение. Такое соединение имеет важное практическое значение для повышения чувствительности измерительного устройства, так как чувствительность (V/°C) одной термопары крайне низкая.
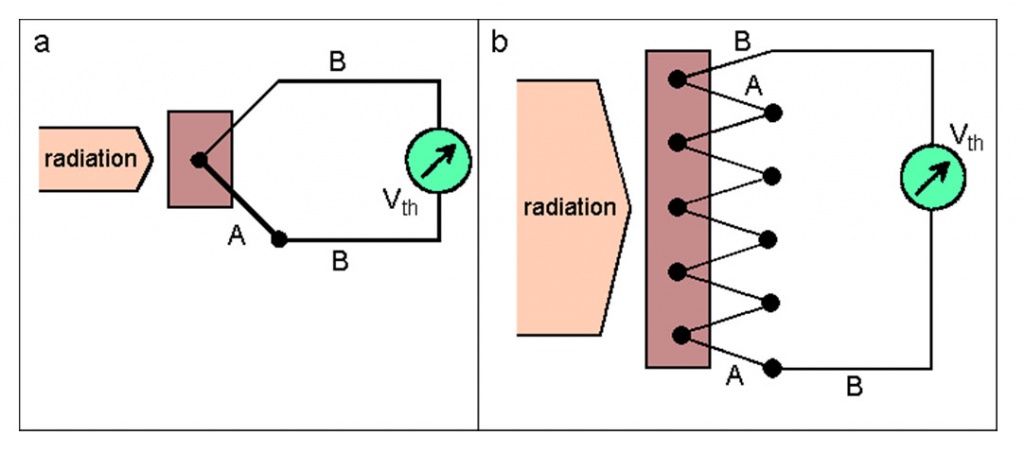
Рис.1. Детекторы лазерной мощности: a) – термопары; b) – термоэлементы
Поверхность детектора покрыта черным абсорбирующим материалом. Назначением такого покрытия является максимальное поглощение мощности падающего лазерного излучения, независимо от его длины волны.
С учетом этих фактов становится очевидным, что конструкция термопары имеет следующие характеристики:
- Термопары имеют низкую чувствительность к световому излучению.
- Термопары должны быть изолированы от внешних источников тепла, которые вносят ошибку в результаты измерений. Типичными внешними источниками тепла могут быть: циркулирующий воздух от приборов, охлаждаемых вентилятором, или даже рука оператора, положенная к головке датчика. Это ограничивает до нескольких милливатт нижний диапазон измеряемой мощности. С другой стороны, термопары являются идеальным инструментом для измерения высокой мощности, если поверхность датчика не повреждена, а тепло может быть отведено посредством воздушного или водяного охлаждения.
- Материал абсорбента является определяющим фактором для точности измерений оптической мощности. Однако следует помнить, что с течением времени покрытие стирается, что ведет к необходимости повторной калибровки.
- Термопары очень медленно реагируют на измерения, основанные на изменении теплового потока. Среднее время отклика варьируется от одной до нескольких секунд.
СЕНСОРЫ НА ОСНОВЕ ФОТОДИОДОВ
Фотодиод представляет собой полупроводниковое устройство, конструкция которого подразумевает наличие двух электродов (анода и катода), между которыми возникает градиент электрического потенциала. Каждый электрод через тонкие провода соединен с двумя выходными контактами. Поскольку эта конструкция чувствительна к механическим воздействиям, то устройство заключено в металлический корпус с защитным прозрачным окном, через которое может проникать излучение.
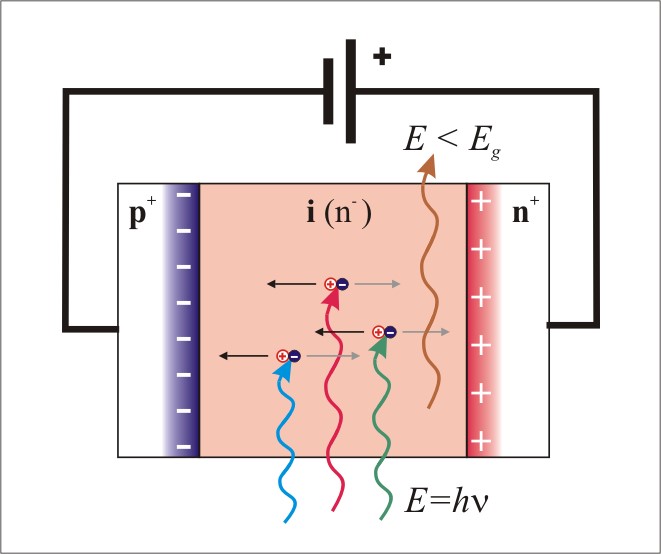
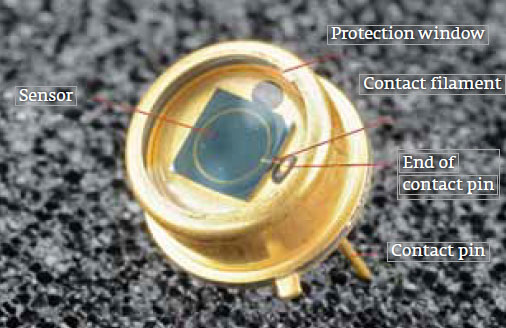
Рис. 2. Принцип работы фотодиода [2] Рис. 3. Схема фотодиода [3]
Рассмотрим функциональные свойства фотодиода, связанные c особенностями его конструкции:
Фотодиод обладает высокой чувствительностью к возбуждающему излучению, поскольку происходит прямое преобразование падающих фотонов в электроны. Обычно квантовая эффективность фотодиодов может быть близкой к 100%. Это позволяет измерять низкую мощность светового потока вплоть до фемтосекундного диапазона. Сверху диапазон измеряемых величин мощности ограничен несколькими милливаттами, выше которых фотодиод переходит в режим насыщения, и генерируемый ток уже перестает расти пропорционально энергетическому световому потоку.
Приемная чувствительная площадка сенсора выполнена из полупроводникового материала. Кремний – материал, который чаще всего используется для регистрации излучения видимого диапазона, так как он имеет низкую себестоимость. Однако Ge и InGaAs, столь необходимые для создания фотодиодов для ближней ИК-области, в противоположность Si являются дорогостоящими. Также датчики сильно ограничены по своим размерам.
Так как приемная поверхность датчика плоская, то устройство представляет собой в некоторой степени зеркало. Полупроводниковые материалы имеют высокий показатель преломления, что приводит к частичному отражению входящего светового потока. Это вносит затруднения в точность измерений.
Защитное окно действует как фильтр: в зависимости от угла и положения падающего луча относительно чувствительной площадки фотодиод может проявлять разную интегральную чувствительность [3].
Может показаться, что фотодиод не подходит для измерений высокомощных лазерных источников, так как площадь сечения высокомощного лазерного пучка превышает чувствительную площадку детектора, и диапазон измерений детектора ограничен значением величины мощности в несколько милливатт. Поэтому многие пользователи идут на компромисс и просто используют термоэлектрические датчики.
Но как поступить, если для работы одновременно требуются высокое разрешение, широкий динамический диапазон и высокая скоростью вывода данных?
ИНТЕГРИРУЮЩИЕ СФЕРЫ
Интегрирующая сфера – это измерительное средство, лишенное недостатков фотодиодов и термоэлементов, о которых сказано выше. Это пассивное метрологическое средство измерений, содержащее полый шар с отверстиями («порты»), которые позволяют лазерному излучению проникать внутрь него и легко его покидать.
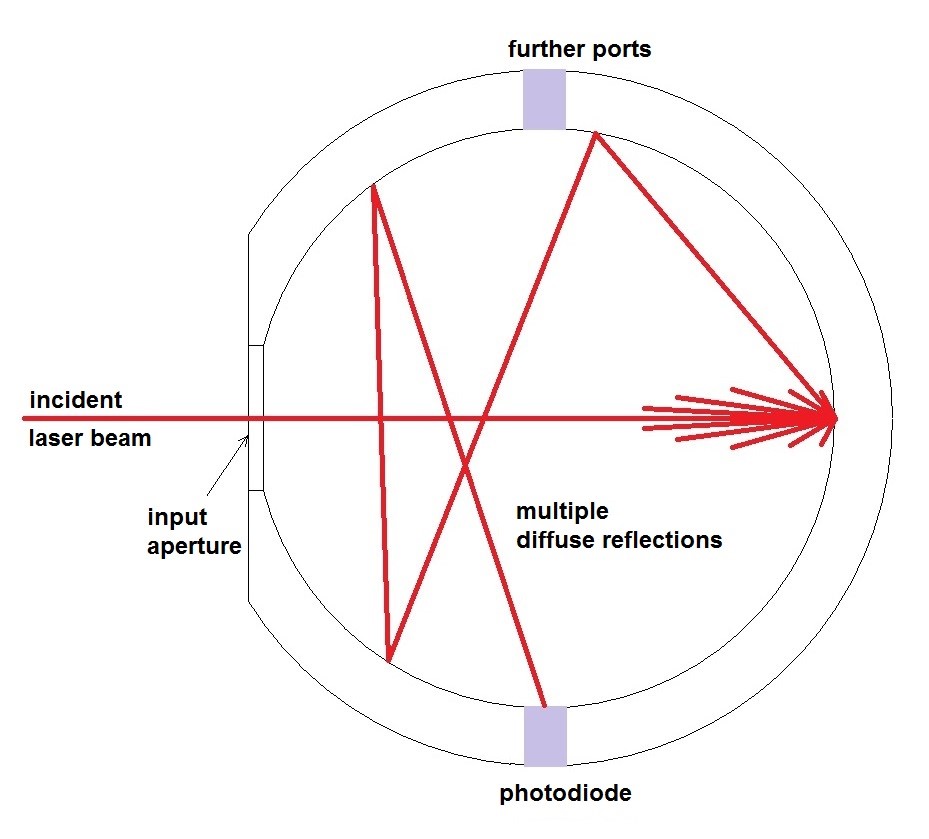
Рис. 4. Принцип работы интегрирующей сферы
Внутренняя поверхность шара имеет покрытие, обладающее высоким коэффициентом отражения в измеряемом диапазоне длин волн. Внутри сферы происходит равномерное распределение падающего лазерного излучения по всей поверхности сферы с помощью многочисленных сильно рассеивающих отражателей.
Полые сферы, изготовленные из специального полимера, подходят для измерений в диапазоне длин волн от 250 нм до 2,5 мкм. Алюминиевые сферы, покрытые сульфатом бария (BaSO4), несколько дешевле аналогов, но со временем покрытие приобретает желтую окраску, и следовательно, сферы становятся непригодными для высокоточных измерений мощности лазера. Для измерения мощности излучения в диапазоне длин волн 700 нм – 20 мкм используют сферы с шероховатой металлической поверхностью, покрытой золотом. В этот спектральный диапазон попадает излучение, генерируемое многими типами лазе-ров высокой мощности. Поэтому твердая медь или алюминий подходят в качестве хорошего материала теплопроводящей подложки интегрирующих сфер.

Рис.5. Комбинация сферы с фотодиодом и оптоволоконным портом
В боковую стенку интегрирующей сферы встроен фотодиод. Он регистрирует только часть лазерной мощности, попадающей в сферу. При этом характеристики падающего на датчик света отличаются от характеристик того излучения, которое падает на сферу:
Плотность мощности излучения получается полностью однородной.
Излучение не поляризовано, даже если входное излучение поляризовано.
Входная мощность сильно ослабляется.
Мы видим, что комбинация интегрирующей сферы и фотодиода позволяет спроектировать лазерный датчик мощности, обладающий преимуществами и фотодиода, и интегрирующей сферы. Подобный датчик может реагировать так же быстро, как фотодиод, и проводить измерения в широком диапазоне значений мощности, как интегрирующая сфера. Меняя размер интегрирующей сферы, можно изменять общую чувствительность системы. Кроме того, чувствительность детектора теперь не зависит от неоднородности плотности мощности и от поляризации излучения, генерируемого лазером. Детектор также не зависит от взаимного расположения падающего луча и поверхности приемной чувствительной площадки детектора, а также от угла падения на нее лазерного излучения.
Интегрирующую сферу можно использовать для измерений пучков с сечениями относительно больших диаметров, поскольку размер приемной площадки фотодиода в этом случае не будет проявлять себя как ограничивающий фактор. Плотность мощности излучения, попадающего на внутреннюю стенку сферы, также значительно меньше той, что попадает на поглощающий термоэлемент. Причина в том, что общая площадь внутренней поверхности сферы, по меньшей мере, в 20 раз больше площади входной апертуры. Таким образом, материал стенки может выдерживать более высокую плотность мощности, и со временем это качество существенно не изменяется.
В боковой части сферы дополнительно могут быть расположены иные измерительные порты, что дает преимущества иного рода. Например, волоконно-оптический порт может использоваться для одновременного измерения спектрального состава излучения лазера.
ПРИМЕРЫ ИСПОЛЬЗОВАНИЯ
В качестве примера использования интегрирующей сферы для измерений рассмотрим практику измерений флуктуаций мощности дискового лазера мощностью 5 кВт. Данный твердотельный лазер используется для обработки материалов. Измерительное устройство представляет собой интегрирующую сферу – медный шар диаметром 200 мм с золотым покрытием и с водяным охлаждением. Поскольку при таких высоких уровнях мощности происходит нагрев интегрирующей сферы, фотодиод требуется установить вне сферы – изменение температуры самого фотодиода может привести к снижению точности измерений мощности. Сфера была оснащена оптоволоконным портом SMA типа, который подключается к соответствующему порту измерителя мощности. Полная система (сфера-волокно-фотодиод) была предварительно откалибрована как единая измерительная установка измерения мощности. Счетчик мощности питается от USB и контролируется. Этим ограничивается число кабелей, используемых в измерениях (один USB-кабель и две линии подачи воды).

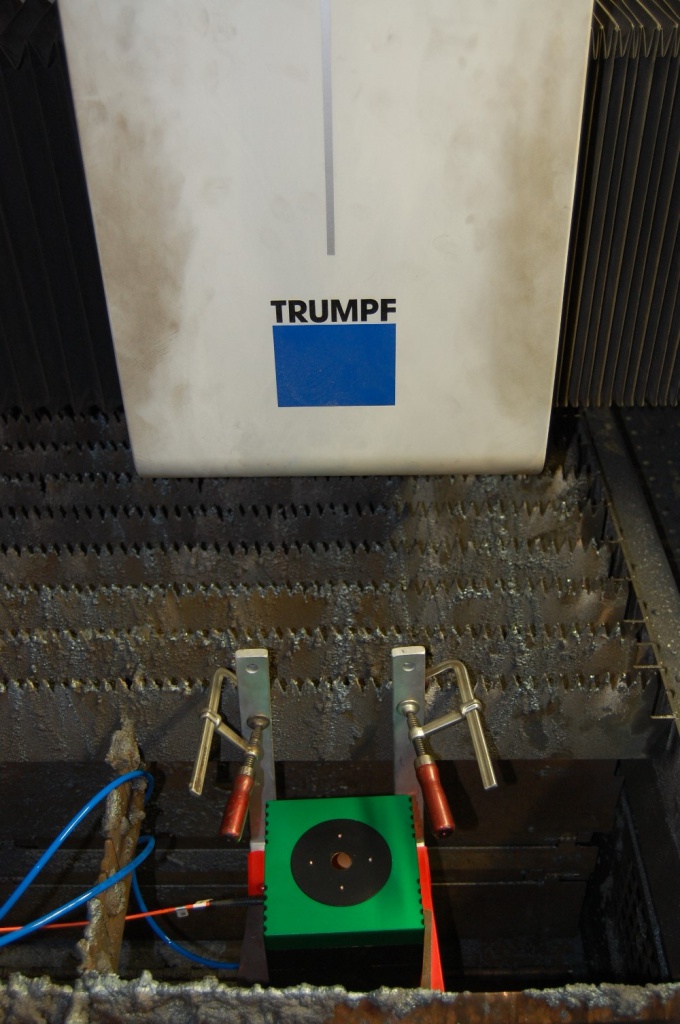

Рис.6-7. Установка интегрирующей сферы и измерителя мощности внутри кабины обработки
Рис. 8. Рабочая измерительная установка (вид через смотровое окно).
Обратите внимание на пирографическую камеру, показывающую температуру поверхности сферы (42 °C)
При использовании измерительной установки было обнаружено, что мощность лазера обладает высокой стабильностью, вплоть до величин 2500Вт. Однако когда мощность излучения возрастает до 5000Вт, наблюдалась долговременная флуктуация около 1,5%.
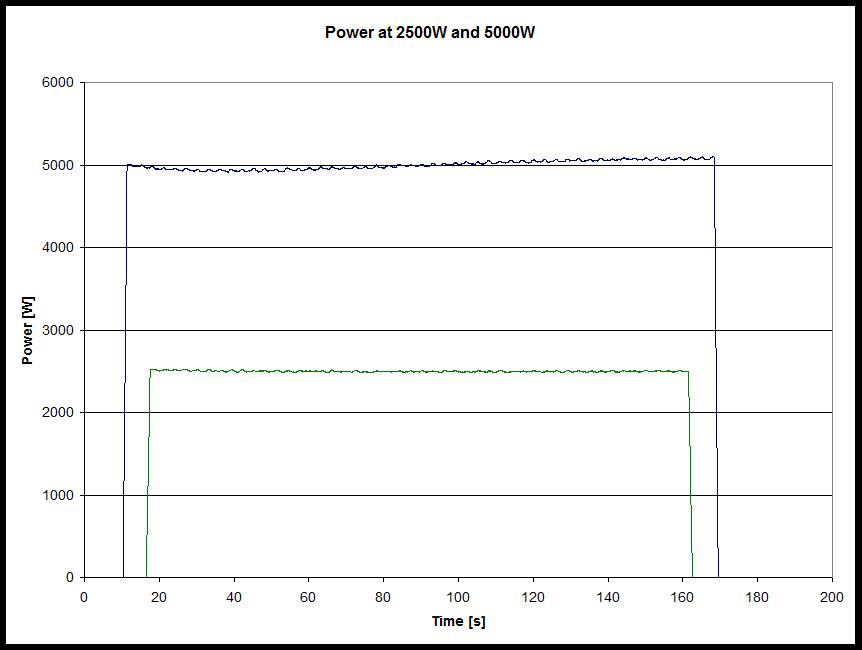
Рис.9. Результаты измерений мощности при Р = 2,5 кВт и Р = 5 кВт
Кроме того, в выходной мощности присутствуют колебания амплитуды, они составляют около 0,7%. Обращаем внимание, что эти более быстрые флуктуации зависят от временного масштаба, который не может быть измерен с помощью термоэлемента.
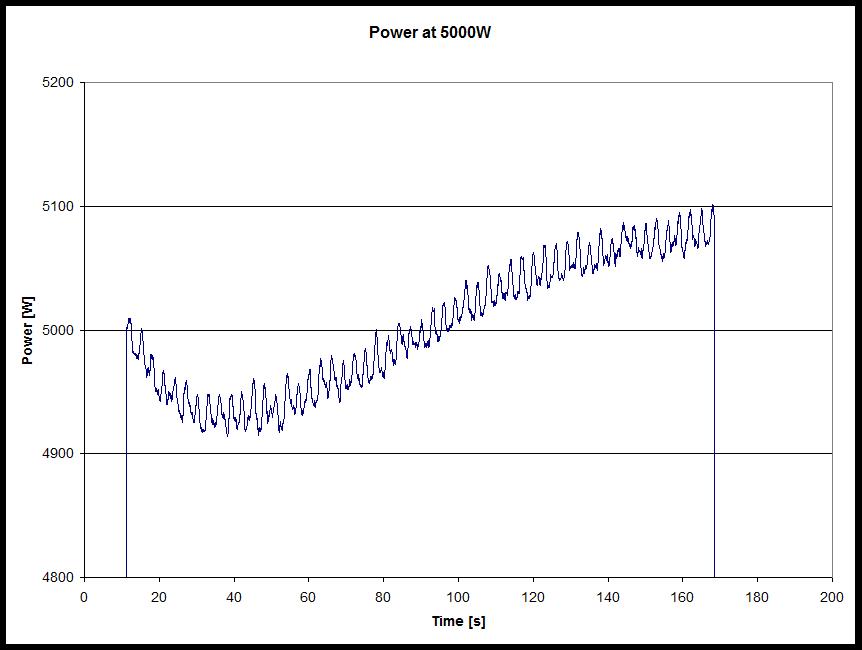
Рис.10. Расширенное представление результатов (см. рис. 9) измерения мощности при 5 кВт
ВЫВОДЫ
Интегрирующая сфера в сочетании с фотодиодом представляет собой практически идеальный датчик для измерения лазерной мощности. При работе с высокомощными лазерами эта комбинация позволяет обнаружить колебания рабочих параметров, которые для термоэлектриче-ского детектора незаметны вследствие слишком длительного временного отклика. С помощью подобной системы можно обнаружить колебания во время работы непрерывных лазерных источни-ков, переходные процессы и флуктуации мощности при запуске лазера, а также кратковременные падения мощности во время работы.
Кроме того, поскольку измерение практически не зависит от величины расходимости пучка, интегрирующие сферы могут использоваться для таких лазерных измерений, как пропускание и отражение на преломляющих и рассеивающих объектах. Например, интегрирующую сферу можно использовать для измерения передачи лазерно-свариваемых пластиковых материалов для определения оптимальных рабочих параметров сварочного лазера.
Танковые системы регистрации лазерного излучения
Помеховое воздействие на системы наведения управляемого вооружения впервые появилось в оснащении танков в 80-е годы и получили наименование комплекса оптико-электронного противодействия (КОЭП). В авангарде стояли израильская ARPAM, советская «Штора» и польская (!) «Bobravka». Техника первого поколения регистрировала одиночный лазерный импульс как признак дальнометрирования, а вот серию импульсов воспринимала уже как работу целеуказателя для наведения полуактивной головки самонаведения атакующей ракеты. В качестве сенсоров применяли кремниевые фотодиоды со спектральным диапазоном 0,6-1,1 мкм, причем селекция была настроена на выделение импульсов короче 200 мкс. Подобная аппаратура был относительно проста и дешева, поэтому получила широкое применение в мировой танковой технике. Наиболее совершенные образцы, RL1 от компании TRT и R111 от Marconi, имели дополнительный ночной канал регистрации непрерывного инфракрасного излучения вражеских активных приборов ночного видения. От такого хайтека со временем отказались – было много ложных срабатываний, а также сказалось появление пассивного ночного видения и тепловизоров. Пытались инженеры сделать всеракурсные системы обнаружения лазерной подсветки – фирма Fotona предложила единый прибор LIRD с приемным сектором в 360 0 по азимуту.
Аналогичную технику разработали в конторах Marconi и Goodrich Corporation под наименованиями, соответственно, Type 453 и AN/VVR-3. Эта схема не прижилась по причине неизбежного попадания выступающих частей танка в приемный сектор аппаратуры, что приводили либо к появлению «слепых» зон, либо к переотражению луча и искажению сигнала. Поэтому сенсоры просто разместили по периметру бронетехники, тем самым обеспечив круговой обзор. Такую схему воплотили в серии английская HELIO с комплектом сенсорных головок LWD-2, израильтяне с LWS-2 в системе ARPAM, советские инженеры с ТШУ-1-11 и ТШУ-1-1 в знаменитой «Шторе» и шведы из Saab Electronic Defence Systems c сенсорами LWS300 в активной защите LEDS-100.
Общими чертами обозначенной техники является приемный сектор каждой из головок в диапазоне от 45 0 до 90 0 по азимуту и 3 0 …60 0 по углу места. Такая конфигурация обзора объясняется тактическими приемами использования противотанкового управляемого оружия. Удар можно ожидать либо с наземных объектов, либо с летающей техники, которая с опаской относится к прикрывающей танки ПВО. Поэтому ударные самолеты и вертолеты обычно подсвечивают танки с малых высот в секторе 0…20 0 по углу места с последующим запуском ракеты. Конструкторы учли возможные колебания корпуса бронированной машины и сектор обзора сенсоров по углу места стал несколько больше угла воздушной атаки. Почему не поставить сенсор с большим углом обзора? Дело в том, что сверху по танку работают лазеры неконтактных взрывателей артиллерийских снарядов и мин, которым, по большому счету, помехи ставить поздно и бесполезно. Проблему также составляет Солнце, излучение которого способно засветить приемное устройство со всеми вытекающими последствиями. Современные дальномеры и целеуказатели, в большинстве своем, использую лазеры длиной волны 1,06 и 1,54 мкм – именно под такие параметры и заточена чувствительность приемных головок систем регистрации.
Следующим шагом развития аппаратуры стало расширение его функционала до способности определить не только сам факт облучения, но и направление на источник лазерного излучения. Системы первого поколения могли лишь приблизительно указать на вражеский подсвет – все из-за ограниченного количества сенсоров с широким сектором обзора по азимуту. Для более точного позиционирования противника пришлось бы обвешивать танк несколькими десятками фотоприемных устройств. Поэтому на сцену вышли матричные сенсоры, как например, фотодиод ФД-246 прибора ТШУ-1-11 системы «Штора-1». Фоточувствительное поле данного фотоприемника разделено на 12 секторов в форме полос, на которые проецируется лазерное излучение, прошедшее через цилиндрическую линзу. Если упрощенно, то сектор фотоприемника, зафиксировавший наиболее интенсивную подсветку лазером, будет определять направление на источника излучения. Чуть позже появился германиевый лазерный сенсор ФД-246АМ, предназначенный для определения лазера со спектральным диапазоном 1,6 мкм. Такая техника позволяет добиться достаточно высокого разрешения в 2. 3 0 в пределах просматриваемого приемной головкой сектора до 90 0 . Существует и другой способ определения направления на источник лазера. Для этого производится совместная обработка сигналов с нескольких сенсоров, входные зрачки которых расположены под углом. Угловая координата находится из соотношения сигналов этих приемников лазерного излучения.
Требования к разрешающей способности аппаратуры регистрации лазерного излучения зависят от назначения комплексов. Если необходимо точно навести силовой лазерный излучатель для создания помех (китайский JD-3 на танке «Объект 99» и американский комплекс Stingray), то разрешение требуется порядка одной-двух угловых минут. Менее строго к разрешению (до 3…4 0 ) подходят в системах, когда необходимо развернуть орудие на направление лазерного подсвета – это реализовано в КОЭП «Штора», «Varta», LEDS-100. И уже совсем низкое разрешение допустимо для постановки дымовых завес перед сектором предполагаемого пуска ракеты – до 20 0 (польская Bobravka и английская Cerberus). На данный момент регистрация лазерного излучения стал обязательным требованием ко всем КОЭП, используемых на танках, но управляемое вооружение перешло на качественно другой принцип наведения, что поставило перед инженерами новые вопросы.
Система телеориентирования ракеты по лазерному лучи стала очень распространенным «бонусом» противотанкового управляемого оружия. Разработали её в СССР в 60-е годы и реализовали на целом ряде противотанковых комплексов: «Бастион», «Шексна», «Свирь», «Рефлекс» и «Корнет», а также в стане потенциального противника – MAPATS от Rafael, Trigat концерна MBDA, LNGWE фирмы Denel Dynamics, а также Stugna, ALTA от украинского «Артем». Луч лазера в данном случае выдает командный сигнал в хвост ракеты, точнее, в бортовое фотоприемное устройство. И делает это чрезвычайно хитро – лазерный кодированный луч являет собой непрерывную последовательность импульсов с частотами килогерцового диапазона. Чувствуете, о чем идет речь? Каждый импульс лазера, попадающий на приемное окно КОЭП, ниже их порогового уровня реакции. То есть все системы оказались слепыми перед командно-лучевой системой наведения боеприпасов. Масла в огонь подлили с панкратической системой излучателя, в соответствии с которой ширина лазерного луча соответствует картинной плоскости фотоприемника ракеты, а по мере удаления боеприпаса угол расходимости луча вообще уменьшается! То есть в современных ПТУРах лазер вообще может не попасть на танк – он будет фокусироваться исключительно на хвосте летящей ракеты. Это, естественно, стало вызовом – в настоящее время ведутся интенсивные работы по созданию приемной головки с повышенной чувствительностью, способной определять сложный командно-лучевой сигнал лазера.
Таким должны стать лазерная помеховая станция BRILLIANT (Beamrider Laser Localization Imaging and Neutralization Tracker), разрабатываемая в Канаде институтом DRDS Valcartier, а также наработки Marconi и BAE Systema Avionics. Но уже есть и серийные образцы – универсальные индикаторы 300Mg и AN/VVR3 оснащены отдельным каналом определения командно-лучевых систем. Правда, это пока только заверения разработчиков.
Настоящую опасность несет программа модернизации танков Abrams SEP и SEP2, в соответствии с которыми бронемашины оснащают тепловизионным прицелом GPS, в котором дальномер имеет лазер на углекислом газе с «инфракрасной» длиной волны 10,6 мкм. То есть на данный момент абсолютно большинство танков в мире не способны будут распознать облучения дальномером этого танка, так как они «заточены» под длину волны лазера в 1,06 и 1,54 мкм. А в США модернизировали уже более 2 тыс. своих Abrams таким образом. Скоро и целеуказатели перейдут на углекислотный лазер! Неожиданно отличились поляки, поставив на свой PT-91 приемную головку SSC-1 Obra от фирмы PCO, способную различать лазерное излучение в диапазоне 0,6…11 мкм. Всем остальным сейчас снова придется возвращать на броню инфракрасные фотоприемники (как это ранее делали Marconi и Goodrich Corporation) на основе тройных соединений кадмия, ртути и теллура, способные распознавать лазеры инфракрасного диапазона. Для этого будут сооружены системы их электрические охлаждения, а в будущем, возможно, все инфракрасные каналы КОЭП переведут на неохлаждаемые микроболометры. И это все при сохранении кругового обзора, а также традиционных каналов для лазеров с длиной волны в 1,06 и 1,54 мкм. В любом случае инженеры от оборонной промышленности сидеть сложа руки не будут.
Лазерные датчики
Для выполнения точных измерений все чаще используются лазерные датчики перемещений, основанные на применении тонко сфокусированного лазерного луча (обычно в видимой, красной, части спектра). Принцип их действия в целом соответствует рассмотренному выше принципу работы фотодатчиков. Обычно такие датчики снабжаются программируемыми контроллерами и обеспечивают получение на выходе как аналоговых, так и цифровых сигналов.
Лазерный датчик перемещения представляет собой бесконтактное оптоэлектронное устройство для измерения геометрических параметров объектов. Подобные датчики применяются для измерения расстояния, перемещения, смещения, длины, ширины, высоты, диаметра, толщины, прямолинейности, плоскостности, овальности, эксцентриситета, шероховатости, профиля деталей, отклонения от вертикальности и т.п. Высокая разрешающая способность и быстродействие позволяют использовать лазерные датчики для измерений биений и вибрации (например, валов), поскольку последние фактически тоже представляют собой перемещения. При этом полученная точность может достигать одной тысячной доли общего расстояния.
Лазерный луч может иметь круглое или линейное (в виде штриха) сечение. Размер лазерного пятна или сечение плоского луча составляет примерно 0,03. 0,3 мкм. В настоящее время используются три основных способа лазерных измерений: оптической триангуляции, лазерного сканирования («оттенения») и радарный.
При измерении расстояния с помощью лазерного датчика наиболее часто используется способ оптической (или лазерной) триангуляции (от лат. triangulus — треугольник; вычисление углов и длин методами тригонометрии). Идея способа (рис. 7.19) заключается в том, что сфокусированный лазерный луч проходит через неподвижную полупрозрачную плоскость отсчета, частично отражаясь от нее на приемную линзу и линейный светочувствительный элемент (детектор).
Сущность метода заключается в измерении расстояний с использованием лазера. Метод использует способность лазерного луча распространяться с малой расходимостью на большие расстояния. Обычно луч лишь освещает точку, расстояние до которой от прибора необходимо измерить. Таким образом, лазер применяется фактически только в качестве указателя.

Рис. 7.19. Принцип оптической (лазерной) триангуляции
Отражение от этой точки (рассеянное или зеркальное) контролируются детектором, который устанавливается на некотором расстоянии от лазерного луча, таком, на котором источник лазерного излучения, объекта и детектор образуют треугольник. На детекторе линза фокусирует отраженный свет, и положение светового пятна на нём показывает направление входящего света, т. е. угол между лазерным лучом и возвращенным светом, откуда расстояние и может быть рассчитано. В качестве детекторов обычно применяются полупроводниковые сегментные детекторы, матрицы и линейки ПЗС. Усовершенствованная оптическая система, обеспечивающая малые размеры пятна проекции, наряду с высокой разрешающей способностью детектора, позволяют в условиях машиностроительного производства измерять линейные перемещения и расстояния с точностью порядка 0,02 мкм.
Для рассеянного отражения расстояние может быть ограничено требованием получить определённую отраженную оптическую мощность. Если лазерный луч производит сканирование в двух измерениях, то можно получить трехмерное (3D) изображение.
Матрица (линейка) детектора подключена к высокоскоростному микропроцессору, который преобразует сигналы измерений в выходные сигналы датчика — дискретный или аналоговый. Положение светового пятна на детекторе, т.е. расстояние s является мерой расстояния L от изделия.
Диапазон измерения лазерных датчиков определяется их назначением и возможностями оптической системы. Например, датчики ЗАО «Сенсор Системе Солюшнс» (Москва) имеют следующие характеристики:
LAH-G: диапазон измерения — 8. 300 мм, разрешение — до 0,5 мкм, цифровая индикация, унифицированный выход; 0. 10 В или 4. 20 мА;
RAM-F: диапазон измерения — 0,5. 200 мм, разрешение — до 0,05 мкм; унифицированный выход; 0. 10 В или 4. 20 мА;
RAM-S: диапазон измерения — тот же, разрешение — до 0,02 мкм; унифицированный выход; 0. 10 В или 4. 20 мА;
RAS-T/RAS-TL: диапазон измерения — 0,5. 200 мм; унифицированный выход; 0. 10 В или 4. 20 мА;
RLD-500: диапазон измерения — 0,1. 500 м, разрешение — до 0,1 мм, релейный выход.
Лазерные триангуляционные датчики серии ЛД1 (ООО «ИНКОМ», Россия) предназначены для использования в системах автоматизации и бесконтактного измерения различных геометрических параметров: толщины материалов, прямолинейности, внутренних и внешних диаметров, сканирования профиля изделий сложной формы, определения положения объектов. На базе датчиков могут быть построены системы автоматического управления различными процессами (следящие системы управления, правка изделий, прокат листовых материалов и др.) Помимо этого датчик имеет возможность подключения позиционирующих сигналов от станков для реализации 3D сканирующих систем. Работа датчика в импульсном режиме позволяет увеличить помехозащищенность.
Некоторые варианты конструктивного оформления лазерных датчиков перемещения приведены на рис. 7.20.
На рис. 7.21 приведены условные схемы измерения различных геометрических параметров с помощью лазерных триангуляционных датчиков перемещения.
Высоту объекта (рис. 7.21, а) можно определять одним датчиком в сравнении с эталонной поверхностью или посредством двух датчиков под объектом и над ним. Поскольку под производственным объектом нередко могут быть расположены транспортные приспособления, для измерения высоты в большинстве случаев предусматривают лишь один датчик. Для измерения прямолинейности (рис. 7.21, б) используется одновременно несколько датчиков, размещенных с одной стороны объекта. С противоположной стороны может быть установлен дополнительный датчик, учитывающий поперечное смещение объекта. В ходе измерения необходимо, чтобы измеряемый объект или датчики находились в движении. Судить о прямолинейности можно только после того, как зарегистрированы данные общей длины.

Рис. 7.20. Лазерные датчики перемещения (примеры)

Рис. 7.21. Схемы использования лазерных триангуляционных датчиков для измерения: а — высоты (два варианта); б — прямолинейности; в — толщины (два варианта); г — щелевой; д — плоскостности (два варианта); е — контура
Для объектов, толщина которых измеряется в направлении транспортировки, достаточно одной линии измерений (левый рис. 7.21, в) в виде двух датчиков, расположенных над и под объектом измерения, либо в виде двух датчиков, измеряющих расстояние от материала и эталонной поверхности (правый рис. 7.21, в).
Если толщина может отклоняться по ширине и длине объекта, потребуются три или более линии измерений. Для получения полных данных о поперечном и продольном профиле следует использовать один неподвижный датчик для эталонной поверхности, и датчик, перемещающийся перпендикулярно направлению транспортировки.
Датчики смещения (щелевые или вилочные, рис. 7.21, г) применяют для измерения смещения края (или краев) деталей, листовых и ленточных материалов. Источник и приемник выполняются в одном корпусе, что значительно облегчает установку датчика. Полученные данные могут быть выведены на дисплей или обработаны с помощью программируемого контроллера или персонального компьютера.
Для измерения плоскостности необходимо, чтобы измеряемый объект или датчики, либо и то и другое находились в движении. При многополосном измерении плоскостности объект движется мимо датчиков под ними (левый рис. 7.21, д). Больше информации можно получить, если одновременно перемещать один или несколько датчиков поперек направления транспортирования (правый рис. 7.21, д).
Измерение контуров (рис. 7.21, е) производится при движении датчика или объекта измерения. При измерении полного профиля по окружности можно расположить измеряемый объект на поворотном диске. При необходимости можно производить измерения по всей поверхности посредством вертикального перемещения датчика.
Сканирующие лазерные датчики состоят из передатчика-излучателя и приемника, между которыми располагается измерительное поле. Такие датчики используют плоский лазерный луч, получаемый в результате его периодической развертки в пределах измерительного поля с помощью специального устройства. При этом приемником измеряется ширина образующейся тени. Подобные приборы иногда называют лазерными микрометрами.
Принцип сканирования лазерным лучом в простейшем случае заключается в следующем. Сфокусированный луч лазерного диода попадает на отклоняющую систему, состоящую из электромагнита и подвижного зеркала с прикрепленным к нему миниатюрным постоянным магнитом. При подаче на электромагнит прямоугольного импульса зеркало перемещается в крайнее положение, при снятии импульса — возвращается в исходное положение. Этот процесс повторяется циклически с определенной частотой. При движении зеркала отраженный от него лазерный луч проходит или отражается от объекта и попадает на фотоприемник (ПЗС-линейку), который отображает положение (или форму) объекта в пространстве в данный момент.
В зависимости от соотношения размера (например, диаметра) детали и диапазона измерения прибора, т.е. ширины лазерного луча) возможны два варианта измерения.
Первый вариант используется, если измеряемый диаметр находится в пределах диапазона измерения приемника (рис. 7.22, а). Длина отбрасываемой тени с высокой точностью фиксируется фотоприемником типа ПЗС-линейки, подобной упомянутой выше.

Рис. 7.22. Измерение диаметра детали с помощью одного (а) и двух (б) лазерных датчиков

Рис. 7.23. Определение контура объекта
Если диаметр детали превышает диапазон измерения одного датчика и/или одного приёмника, можно использовать схему из двух одинаковых датчиков и приемников, расположив их в соответствии с рис. 7.22, б. При этом в значении измеряемого диаметра учитывается расстояние между лучами двух датчиков.
Общий диапазон измерения лазерных микрометров составляет от 0,02 до 1500 мм и более. Например, датчики серии METIS включают диапазоны 0,2. 45, 0,5. 90,
1. 120, 1. 150 и 1. 180 мм с погрешностью 2, 3, 4, 6 и 8 мкм соответственно. Разрешающая способность таких датчиков составляет от 0,0054 до 0,022 мкм, масса датчиков — от 1,5 до 11,5 кг соответственно.
Сканирующие датчики используют и для точного определения контура или профиля объекта (рис. 7.23, 7.24).
Пример измерения биений вала приведен на рис. 7.25. Процесс измерения выполняется при движении объекта в измерительном поле. Обработка результатов измерения выполняется автоматически после полного прохождения объекта через измерительное поле.
Принцип работы радарных датчиков основан на измерении времени прохождения луча, который отражается от рефлектора, расположенного на объекте, или же непосредственно от самого объекта Дальность измерений в режиме отражателя достигает 1000 м и более. Подобные датчики в машиностроении используются весьма редко.

Рис. 7.24. Контроль профили изделий

Рис. 7.25. Контроль биений вала
Лазерные датчики обычно имеют модульную конструкцию, что позволяет использовать несколько заменяемых измерительных головок для выполнения практически любых измерений. Они дают возможность не только определять перемещения или толщину, но и обнаруживать тончайшие разрывы в ленточных материалах, предметы со структурированной поверхностью по общему количеству отраженного света, контролировать точность сопряжения трехмерных поверхностей крупногабаритных деталей и т.д.
Лазерные датчики отличаются высокой точностью, возможностью контроля качества и характеристик геометрически сложных деталей, контроля наружных и внутренних линейных размеров тел вращения. Они не повреждают и не разрушают поверхность детали, работают на любых поверхностях.
Измерительные системы на основе лазерных датчиков положения создаются для использования в производственных процессах, где требуется быстрый высокоточный контроль геометрических параметров статических и динамических объектов, обладающих сложным профилем поверхности различного цвета, микроструктуры и шероховатости.
Детекторы лазерного излучения в Москве
- Радар-детекторы автомобильные
- Детекторы валют
- Детекторы проводки, труб и конструкций
- Прочие измерительные инструменты
- Строительные нивелиры и лазерные уровни
- Прижимные устройства для деревообрабатывающих станков
- Аксессуары для нивелиров и лазерных уровней

Лазерный уровень FLUKE 180LR
Детектор зеленого лазерного луча DEWALT DE0892G-XJ
Детектор зеленого лазерного луча Dewalt DE0892G
Детектор красного лазерного луча DEWALT DE0892-XJ
Детектор красного лазерного луча DEWALT DE0892-XJ
Optex LAC-1 детектор лазерного излучения
Детектор DEWALT DE 0892 красного лазерного луча
Детектор зеленого лазерного луча DEWALT DE0892G
Приемник лазерного луча Leica RVL100
Детектор зеленого лазерного луча DeWalt DE 0892 G
Детектор лазерного луча DeWALT DE0892-XJ
Детектор для лазерного уровня Kapro 894-04
Детектор Condtrol 2-17-199
Детектор лазерного луча DeWALT DE0892G-XJ
Детектор красного лазерного луча DeWalt DE 0892
Детектор лазерный DeWalt DE 0772-XJ
Лазерный уровень RGK LP-62
Детектор электромагнитного излучения Импульс
Приемник лазерного луча Leica Rod-Eye 140
Детектор для лазерного уровня Kapro 894-04G
Приемник лазерного луча ADA LR-60 GREEN
Приемник луча построителей плоскости ADA LR-60
Приемник лазерного излучения Bosch LR 6 [0601069H00]
Приемник лазерного излучения Bosch LR1 601015400



Приемник для луча лазерных нивелиров Condtrol 1-7-032
Лазерный уровень ELITECH ЛН 360/1
Детектор зеленого лазерного луча DEWALT DE0892G
Детектор ионизирующего излучения BR-6b
Физиотерапевтический лазерный аппарат «Глазник»
Приемник лазерного излучения Bosch LR 7 0601069J00
Приемник лазерного луча Leica Rod-Eye 160
Детектор-отражатель FUBAG Laser detector [31647]
Приемник лазерного излучения Bosch LR 7 [0601069J00]
Тестер лазерного излучения Optex LAC-1
Портативный детектор валют Cassida Sirius
Приемник излучения ADA Lr-60
Топаз-4002 — 9-канальный лазерный источник оптического излучения
Детектор электромагнитного излучения Espada Gm3120
FUBAG Отражатель лазерный (приемник) Laser detector
Детектор ADA instruments LR-60 (А00478)
Приёмник лазерного излучения Leica Rod Eye 160
Детектор ЗУБР Профессионал DX-750
Детектор электромагнитного излучения Espada GM3120
Водонепроницаемый цифровой лазерный детектор с зажимом для лазерных уровней DEWALT DE0772-XJ
Лазер с лучом «Линия»
Универсальный просмотровый детектор Mbox MD-150
FUBAG Отражатель лазерный (приемник) Laser detector
Grandway FHS2D02F — источник лазерного излучения, 1310/1550 нм, -5 дБм, код определения длины волны
Детектор-отражатель для лазерных нивелиров CONDTROL
Приемник лазерного луча ADA LR-50 (для ARMO 2D/3D)
Датчики лазерного излучения


- Аксессуары
- Блоки питания для ПЛК и датчиков
- Датчики и преобразователи давления промышленные
- Датчики линейных перемещений и расстояний
- Датчики оптические для специальных задач
- Датчики положения
- Датчики, реле потока воздуха и промышленных газов
- Датчики, реле потока жидкости
- Датчики температуры промышленные
- Датчики ускорения — акселерометры
- Датчики угла наклона — инклинометры
- Датчики угловых перемещений, энкодеры, потенциометры
- Датчики щелевые
- Индикаторы, преобразователи и регуляторы
- Мониторинг и диагностика
- Расходомеры жидкости
- Расходомеры сжатого воздуха и промышленных газов
- Сигнализаторы уровня жидкости и сыпучих веществ
- Сканеры штрих-кодов промышленные
- RFID компоненты
- Уровнемеры
- Сигнальное оборудование
- Безопасность на производстве
- Промышленные интерфейсы
- Системы освещения на производстве
- Бесконтактные системы передачи данных
- Аксессуары
- Блоки питания для ПЛК и датчиков
- Датчики и преобразователи давления промышленные
- Датчики линейных перемещений и расстояний
- Датчики — преобразователи линейных перемещений
- Датчики расстояния индуктивные
- Датчики расстояния лазерные
- Датчики расстояния ультразвуковые
- Линейные энкодеры
- Потенциометрические датчики линейных перемещений
- Тросиковые датчики линейных перемещений
- Все
- Balluff
- Banner Engineering
- Datalogic
- IFM Electronic
- Leuze electronic
- Pepperl+Fuchs
- SICK
Каталог промышленных оптических датчиков расстояния — лазерных дальномеров Balluff, Banner, IFM Electronic, Leuze Electronic, Pepperl+Fuchs, SICK с аналоговыми выходами 4-20 мА, 0-10 В или цифровыми интерфейсами на различные диапазоны измерения. Бесконтактное измерение расстояние — постоянно возникающая задача в современном производстве, решить ее помогут лазерные датчики расстояния, представленые в данном разделе каталога.

Диапазон измерения: 0,05. 8 м. Источник излучения: лазер (класс 1), красный. Световое пятно: 7х7 мм. Разрешение: 3 мм. Точность: 30 мм. Время измерения: 3,5. 50 мс. Выходной сигнал: 4. 20 мA/0. 10 В + 2xPNP/NPN NO/NC. Интерфейс: IO-Link. Температурный диапазон эксплуатации: -40. +50 °C. Питание: 18. 30 V DC. Подключение: кабель 0,2 м с разъемом M12 5 pin.

Диапазон измерения: 0,2. 10 м (подавление заднего фона до 19 м) . Источник излучения: лазер (класс 2), красный. Световое пятно: 15х15 мм. Точность на максимальном расстоянии: ± 47,0 мм. Частота измерений: 1-50 Гц. Выходной сигнал: 4. 20 мA/0. 10 В + PNP NO/NC. Интерфейс: IO-Link. Температурный диапазон эксплуатации: -10. +60 °C. Питание: 18. 30 V DC. Подключение: разъем М12 5 pin.

Диапазон измерения: 1. 75 m (подавление заднего фона до 150 м) с отражателем E21159. Источник излучения: лазер (класс 2), красный. Световое пятно : 150х150 мм. Точность на максимальном расстоянии: ± 63,0 мм. Частота измерений: 1-33 Гц. Выходной сигнал: 4. 20 мA/0. 10 В + PNP NO/NC. Температурный диапазон эксплуатации: -10. +60 °C. Питание: 18. 30 V DC. Подключение: разъем М12 4 pin.

Диапазон измерения: 0,2. 10 м (подавление заднего фона до 100 м). Источник излучения: лазер (класс 2), красный. Световое пятно : 15х15 мм. Точность на максимальном расстоянии: ± 65,0 мм. Частота измерений: 1-33 Гц. Выходной сигнал: 4. 20 мA/0. 10 В + PNP NO/NC. Интерфейс: IO-Link. Температурный диапазон эксплуатации: -10. +60 °C. Питание: 18. 30 V DC. Подключение: разъем М12 5 pin.

Диапазон измерения: 0,3. 6 м (подавление заднего фона до 100 м). Источник излучения: лазер (класс 1), красный. Световое пятно : 8х8 мм. Точность на максимальном расстоянии: ± 165,0 мм. Частота измерений: 1-33 Гц. Выходной сигнал: 4. 20 мA/0. 10 В + PNP NO/NC. Температурный диапазон эксплуатации: -10. +60 °C. Питание: 18. 30 V DC. Подключение: разъем М12 4 pin.

Диапазон измерения: 0,2. 10 м (подавление заднего фона до 100 м). Источник излучения: лазер (класс 2), красный. Световое пятно : 15х15 мм. Точность на максимальном расстоянии: ± 65,0 мм. Частота переключений: 5 Гц. Выходной сигнал: PNP NO/NC. Температурный диапазон эксплуатации: -10. +60 °C. Питание: 18. 30 V DC. Подключение: разъем М12 4 pin.