Видеонаблюдение на ардуино
TTL-модуль видеокамеры для Ардуино со стандартом NTSC
Ардуино – одна из популярнейших систем для реализации проектов различной сложности, от простейших автоматизированых ферм до умных домов и полноценных систем защиты. Всё зависит исключительно от фантазии самого инженера и его навыков программирования, а также обращения с паяльником и проектирования.
Такой обширный функционал достигается благодаря множеству модулей различного предназначения, одним из которых является Ардуино камера. Она пригодится как для написания умных нейросетей, так и для простого отслеживания того, что происходит у вас в квартире, когда вы не дома. Давайте разберёмся, какие характеристики есть у таких датчиков и как их лучше всего реализовать в жизнеспособных системах.
Основным производителем таких камер сейчас является компания — adafruit.com.
 Пример модуля камеры: OV7670 300KP VGA Camera Module
Пример модуля камеры: OV7670 300KP VGA Camera Module
Характеристики TTL камеры
Сам TTL модуль работает на стандарте NTSC протокола, который известен всему миру благодаря возможности безналичной оплаты в смартфонах. Андроид, в отличие от продукции купертиновцев, давно научился применять эту технологию для беспроводного управления любой техникой.
 TTL Serial JPEG камера с NTSC видео от Adafruit
TTL Serial JPEG камера с NTSC видео от Adafruit
Дело в том, что такая передача данных имеет куда более защищённые протоколы, чем у блютуз или беспроводного интернета, что усложняет взлом злоумышленниками вашей охранной системы. А ведь, как известно, большую часть камер можно спокойно просмотреть, находясь на другом конце света, притом для этого не потребуется никаких навыков хакера. Достаточно скачать простое приложение и знать ресурсы, предоставляющие адреса устройств по месту их расположения.

Но не только в защитных целях годится Аrduino камера, её можно применять и для создания собственных фотоаппаратов и вебок, если вы захотите. А благодаря встроенным возможностям по настройке диафрагмы и насыщенности цветов можно получить такие кадры, которые не каждая зеркалка или мыльница с хорошим объективом способны выдать.
И, наконец, авто-контраст и авто-яркость прекрасно подходят для отслеживания движений даже в тёмных помещениях, что позволяет устанавливать их вместо соответствующих датчиков. Но, конечно, без соответствующего софта это просто груда железа. Благо, найти подходящие библиотеки, благодаря доступности Ардуино, не так и сложно, достаточно просмотреть пару тематически англоязычных форумов.
Но не заблуждайтесь, такие модули не предназначены для профессиональной фотографии, ведь их максимальное разрешение не выходит за пределы 630 на 480, предоставляемых даже самой дешёвой веб-камерой. Пример того как выглядит итоговое изображение:

При этом, у неё есть куда более значимые достоинства, перекрывающие все недостатки, например:
- Камеры чувствительны к ИК излучению, что не только даёт обнаружить любые изменения в цветопередаче, но и позволяет отслеживать движения в полной темноте. Учитывайте, что каждый модуль индивидуален, и подбирать его стоит по вашим требованиям, в данном случае мы рассмотрим именно систему видеонаблюдения.
- Размеры в 32 мм квадратных при фотоматрице CMOS в четверть дюйма.
- Соответственно разрешению, и мегапикселей немного – всего 0.3.
- А вот формат выходных данных зависит от камеры; если вам нужен простой модуль для видеонаблюдения, то подойдёт и стандарт M-JPEG, который будет выдавать не более 30 кадров в секунду.
- Все параметры, будь то баланс белого или экспозиция, автоматически подстраиваются в зависимости от программы.
- Максимальное усиление – 16 Дб, а вот динамический диапазон – все 60 Дб.
- Угол обзора небольшой – всего 60 градусов, учитывайте это, когда будете выбирать место для установки. Но его можно значительно расширить, прикупив специальные фишай линзы.
- Фокусное расстояние – от 10 до 15 метров.
- Битрейт установлен изначально 38400, менять его вроде бы и можно, с помощью АТ+ команд, но на деле это не работает или же попросту бесполезно.
- Потребляют такие модули в среднем 75 мА, учитывайте это, если собираетесь сделать автономную камеру видеонаблюдения.
- Работает в функциональном напряжении 5В, а подключается по 3.3 В TTL через три проводника.
Теперь, когда мы изучили техническую сторону вопроса, необходимо разобраться в подключении, если с Ардуино вы столкнулись впервые.
Подключение и настройка
Зачастую камера для Ардуино приходит без коннекторов, поэтому вам необходимы специальные проводники, которые придётся подпаивать к пинам отдельно. Благо контакты расположены приблизительно в 2-х мм друг от друга, что упрощает подключение видео с Аrduino к МК.

Так что сгодятся любые толстые проводники и самые обычные жала для распайки, без ювелирной работы, которую приходится проделывать на тех же датчиках движения, что является ещё одним преимуществом, которое предоставляет Аrduino видеонаблюдение, в отличие от аналогов.
Если же вам не нужна видеосъемка, по какой-то причине, то достаточно и 4-х проводов. Естественно, лучше подобрать разные цвета, для удобного кабель-менеджмента, когда вы будете упаковывать поделку в заготовленный корпус. В нашем случае расклад таков:
- Для 5В пина подключаем красный проводник.
- На заземление отправляем черный.
- Белый идёт на пин для получения данных.
- Зеленый – на TX, предназначенный для передачи картинки.
Естественно, вы можете припаивать и другие цвета или сделать всё однотонным, это не повлияет на функционал. Такая расстановка необходима лишь для того, чтобы при подключении к МК усилителей или дополнительных модулей не возникало никаких проблем. Ведь далеко не все камеры обладают встроенным микрофоном, а звукозапись в устройствах наблюдения никому ещё не вредила.
Соединение деталей, схема
Теперь соединим всё вместе. Эта схема предоставлена самим производителем таких камер — Adafruit:

Программирование
Так как мы говорим о простейшей реализации, то предполагаем, что у вас нет навыков работы с С++, а соответственно, сгодится любая библиотека из общественного источника.
Но если малейший опыт работы с МК имеется, то постарайтесь выбрать код, который не будет работать через раз и по необъяснимой магии. Это значительно сэкономит вам нервы, ведь в сообществе, тем более русскоязычном, есть множество «недоинженеров», пишущих функции без каких-либо знаний базовых алгоритмов и основ программирования.
Для камеры нужно использовать приложение Windows Comm Tool. Нужно использовать серийный протокол. Сами производители рекомендуют переходник для FTDI или USB/TTL конвертер. Для Arduino можно брать серийный чип (FTDI) и загрузить скетч в мк:
Для плат типа Leonardo нужно брать этот код:

Теперь нужно скачать и настроить библиотеку от производителя:
Обнаружение движения
Благодаря расширенному спектру такая камера подойдёт и в качестве датчика движения, способного реагировать ночью на любой шорох. Если подключить её к смартфону, о чём мы еще поговорим, можно настроить двойной протокол передачи данных.
Когда телефон удаляется настолько, что NTSC перестаёт работать, информация и СМС будут передаваться по беспроводному интернету и наоборот.
Связка: камера, Ардуино и Андроид
Как уже упоминалось, всю систему можно привязать к вашему смартфону, и это решение имеет множество достоинств. Сделать это удастся с помощью специального приложения, но новичкам лучше не использовать NTSC, доступный в модуле, ведь с ним будет много мороки.
Лучшим выбором, для проверки работоспособности проекта в принципе, будет блютуз модуль и соответствующее приложение на Андроид, позволяющее работать с ним. А уже затем можно начинать эксперименты с усложнением системы.
Использование видеокамеры с Arduino
Как применять подобную систему, решать исключительно вам, вот лишь несколько проектов, которые можно взять на заметку:
- Видеонаблюдение за квартирой.
- Автоматизированные фермы и теплицы, в которых есть микроклимат, и, дабы его не нарушать, наблюдение стоит вести удалённо.
- Замена датчику движения, при соответствующем софте.
Сверхдешёвая камера с управлением — своими руками

В качестве преамбулы скажу, что поскольку, подобная статья уже была, я по-началу и не собирался писать о камере на хабр.
Камера была сделана, просто ради интереса, тренировки навыков и отработки технологии удалённого управления физическими объектами.
Немного позже использовал эту систему как наглядный пример, сопровождающий обзор, на другом ресурсе (а фактически, в качестве чита что-бы подтянуть голоса). Это был настоящий бета-тест, который выявил кучу недоработок. За это огромное спасибо всем неравнодушным, помогавшим кто советом, а кто и куском кода.
При этом, посетители, которые игрались с камерой, помимо того, что не проходило и часу чтобы не помянули хабр, так ещё и начали активно интересоваться устройством всего этого дела, техническими деталями, программной реализацией и конечно же стоимостью.
Вот это всё и сподвигло меня на статью. А чтобы не повторюшничать, я и решил заостриться на стоимости, т.к. у автора предыдущего топика на эту тему, насколько я помню, итоговая стоимость вылилась во что-то в районе 5000р.
О том какова стоимость моей поделки: читаем ниже.
Итак, «как корабль назовешь, так он и поплывет», раз написал заголовок про дешевизну — буду соответствовать прозой, так что, детали — потом, а сперва о стоимости.
Пройдём по ценам*
* все цены даны со скидками. О скидках — отдельно, пожже.
Необходимый набор:
- Arduino Uno (или nano) — 15.29$
- Сервопривод (рулевая машинка) SG90 2х2.37$ = 4.74$
- Вебкамера 3.01$
Итого: 23.04$ (примерно 750р, на данный момент)
Дополнительный набор (ленивости + плюшки):
- Экран от Nokia 5110 — 250р (в комплекте с самой Нокией и блоком питания, куплено пару лет назад, будем считать, что именно для этой цели, реально можно найти уже вдвое дешевле, или вообще на халяву)
- MegaShield v4 к Arduino — 5.86$
- Проводки-коннекторы — 2.86$ (40 штук за эту цену, реально использовано 7)
- Сверхяркий сверхсиний све
рхтодиод для подсветки экрана — 5р/шт (лучше 4шт., у меня сделано неправильно)
Итого: примерно 550р
Всего: 1300р
О реализации
Всё делалось с нуля. Повторять то, что уже было — я не стал, во-первых из соображений тренировки, а во-вторых Ethernet-модуля у меня на тот момент не было, я решил что это всё слишком сложно (там был завязан MySQL) и это решение мне однозначно не подойдёт.
О задачах
Задачи я себе обозначил следующие:
- Видеть картинку/видео
- Иметь возможность управлять камерой
- Иметь возможность управлять размером и качеством видео или картинки, причём не «уже на стороне клиента», а «ещё на стороне сервера, по команде клиента». Такая необходимость возникла из-за того что мне не везде доступен «большой и широкий интырнет»
- Обеспечивать приемлемую «реалтаймовость»
- Иметь задел на будущее — управление нагрузкой 220В и т.д. Собственно ради этого всё и затевалось, т.к. готовые решения либо жутко дороги, либо такой возможности не предоставляют.
О проблемах
В ходе реализации возникли вопросы вот такого плана:
- Видео либо грузит процессор в случает показа на несколько пользователей, либо даёт задержку 5-10, т.е. не обеспечивает «реалтаймовость», из-за чего нельзя сразу определить адекватность и вообще работоспособность управления
- Использование сервиса трансляций, хотя и сильно разгружает сервер в случае большого онлайна, не обеспечивает необходимую надёжность, и, опять же, даёт задержку
- Специальный сервер для трансляции видеопотока требует определённых навыков, которых у меня пока что нет
- Использование отображения путём смены картинок не обеспечивает высокий fps, а также постоянно обращается к жёсткому диску, что, при большом количестве пользователей, может вызывать лаги картинки не из-за загрузки процессора, а именно из-за обращения к диску
О решениях
- Решено использовать в качестве отображения — картинки
- Для исключения жёсткого диска из процесса выдачи картинок установлен RamDisk, на который дважды в секунду «ложится» изображение с вебкамеры
- Для выдачи картинки решено использовать php и gdlib
- Обновление картинки инициируется клиентом посредством javascript и ajax, и происходит без обновления самой странички
Довольно лирики!
Как выглядит
Выглядит всё более чем скромно
Работает примерно так:
Ардуина, если кто не видел 
Мегашилд с проводками 
«Сэндвич» в профиль 
«Сэндвич» анфас 
LCDшка 
Она же вид сзади (пины и кондёр) 
В сборе 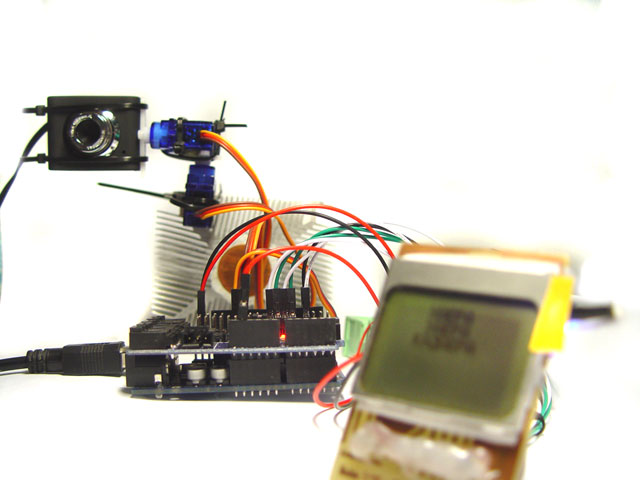
В сборе 2 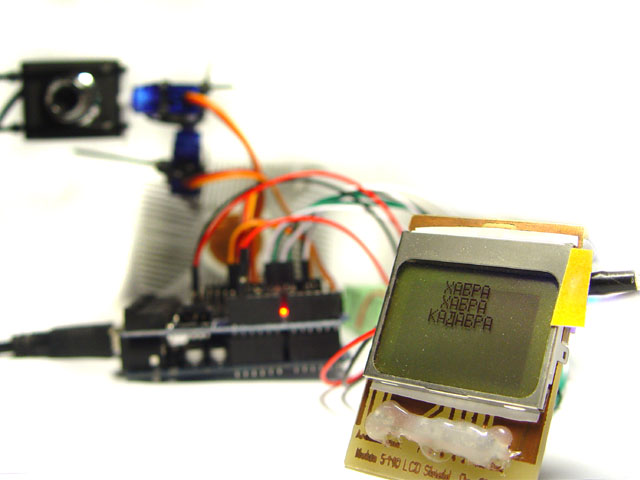
Колхоз — система проводков и верёвочек (крепление камеры) 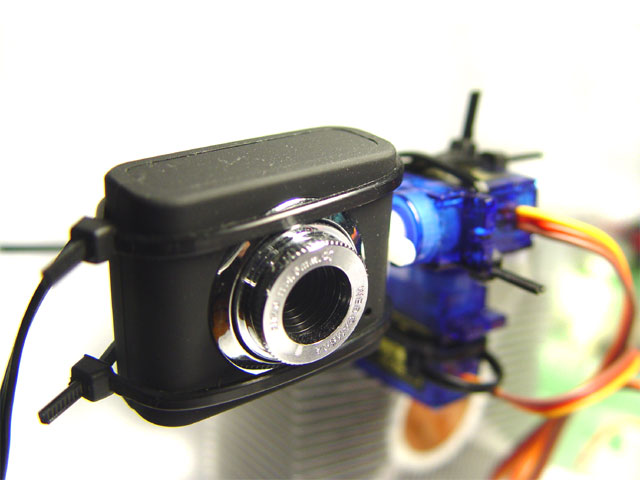



Куда же без него 
Как устроено аппаратно
Вебкамера подлючена по USB к компьютеру.
Arduino тоже подключена к компьютеру по USB.
Все внешние устройства, ввиду исключительно малого потребления тока, подключены напрямую к Arduino, работает круглосуточно уже полтора месяца, с онлайном 10 пользователей в момент наименьшей нагрузки.
Как работает программно
На стороне клиента чистый веб-интерфейс, без всяких плагинов и примочек. Только html, css, и javascript (+ajax).
На стороне сервера
- Сам сервер — Apache
- Обработчик скриптов — php
- Приём картинок с камеры — любая самая простая доступная, бесплатная или самопальная программа для сохранения картинок с вебкамеры
- Хранение картинки — RamDisk, утилита для создания дискового раздела в оперативной памяти (русскоязычная версия RAMDisk «Enterprise» бесплатна для локализованных систем)
- Чтобы не прописывать в php прямых локальных путей, папка с картинкой смонтирована в www папку с помощью juction (бесплатная утилита Марка Руссиновича)
- Передача управления из интернета к Arduino реализована с помощью программы-прокси, следующим образом: php скрипт создаёт UDP сокет и отправляет датаграмму на определённый порт, далее программа-прокси слушает этот этот порт и принимает приходящие на него сообщения и отправляет их на COM-порт Arduino (можно даже без обработки). Выбор UDP вызван исключительно для упрощения системы, UDP не требует никаких подтверждений и проверок о доставке-отправке ни со стороны клиента, ни со стороны сервера.
На стороне Arduino
- Сама (почему «сама»? потому что «плата») Arduino
- Скетч внутри неё — стандартные примеры из штатного набора arduino-0022 servo и serial + найденная на просторах интернета библиотека для дисплея, доработанная до приемлемого вида (в плане кириллицы и латиницы одновременно)
- На данный момент плюсом стоит мегашилд, чисто из-за удобства и культурного вида — в этом варианте я не спаял ни одного проводка (за исключением платы к дисплею)
Система выдержала все нашествия и рейды, а так же онлайн более 120 пользователей.
Были случаи отказа управления, которые случались из-за моих недоработок в программе-прокси, в частности из-за недостаточной обработки ошибок, в то время как програмная часть со стороны Апача и Ардуино держалась достойно.
Будьте внимательны к мелочам
Хочу отметить проблемы с программной частью которые случались из-за собственной невнимательности/неосведомлённости/ненаблюдательности:
- Первое с чем я серьёзно мучался: Arduino принимает из отправленной на её виртуальный COM-порт строки отдельно первый байт и отдельно всё остальное. Какие изощрения я только не пробовал — и с массивами и с кучей проверок… Хоть ты убейся. Решение проблемы? Пришло неожиданно и внезапно, в моментк огда я об этом и не думал: Sleep 2 после чтения каждого байта. ВСЁ!
- Вторая проблема — серьёзная нагрузка на сервер, казалось бы, из ничего, возникла потому, что обновление картинки было сделано по таймеру, не дожидаясь собственно факта загрузки картинки (или ошибки загрузки). Таком образом отсылалась куча «лишних» запросов.
- Третье: FireFox оказался самым правильным и капризным браузером, и заставил меня учиться писать валидный код. Так например, событие OnClick по элементу Option работать не должно. А оно работет, везде кроме огнелиса.
- Четвёртая, совершенно не явная и редко всплывающая: периодически картинка «ломалась». Как выяснилось, это происходило в момент когда файл был занят при записи. Т.е. проверка file_exists() проходила, а файл оставался залоченным. Не помогла и проверка is_writable(). Пришлось организовывать цикл по наличию ошибки и внутри него отрабатывать чтение файла «до победного конца».
Оставшиеся недоработки
Есть и такие.
- Во-первых, это описанные в каментах «левые» символы иногда появляющиеся в конце сообщения на экране. На самом деле это команды управления. Уши этого бага растут из того что если активно спамить или жать кнопки, буфер ком-порта не успевает полностью прочитаться Ардуиной и последующие сообщения валятся в конец буфера. Решение есть, но пока не сделано.
- Во-вторых, это периодическое падение UDP-сокета в программе прокси при большом онлайне. В чём причина — не знаю. Проявляется не сразу. Умирает и не «откисает». Помогает закрытие сокета и бинд по-новой. Возможно, виноват кривой видовский winsock.ocx. Переписывать это дело на API в бейсике, как-то лень. Пока одним из «топорных» решений вижу сброс и ребинд сокета по таймеру, каждые, скажем, полчаса.
О скидках
Общеизвестно, что в Китае — дешевле. Главное знать места, где именно дешевле, и как добыть дополнительную скидку.
Тут смысла писать нет — слишком большой объём текста с картинками, к тому же известный большинству.
Поэтому дабы не провоцировать ярых противников борьбы со спамом и прочим «реферальством», отмечу необходимый минимум — это скидка 15% на BiC, складывающаяся из одноразового купона на 10% и скидки за первую покупку 5% при вводе рекомендателя + хинт, как использовать эту систему неоднократно.
Все заинтересовавшиеся, могут ознакомиться с полной информацией по ссылке на страничке с, собственно, самой камерой.
Ссылки
Камера, работающий экземпляр, для тех кто ещё не видел и не наигрался
Топик, в котором ссылку на камеру слили на хабр раньше времени
RAMDisk
juction
Исходники (упрощённые, во избежание) клиентской части, серверной (php) и программы web-arduino-прокси (VB 6.0)
Apache, php, либо какие-то комбинированые сборки и т.д. — на свой вкус.
Подключение камеры OV7670 к Arduino Uno
Видеокамеры (камеры) в настоящее время находят широкое применение в электронной промышленности и имеют множество применений, таких как система мониторинга посетителей, система наблюдения, система учета посещаемости и т.д. Камеры, которые мы используем сегодня, умны и имеют множество функций, которых не было в предыдущих моделях камер. Современные цифровые камеры не только захватывают изображения, но также захватывают и высокоуровневые описания изображений и анализируют то, что они видят. Они широко используются в робототехнике, искусственном интеллекте, машинном обучении и т. д. Захваченные кадры обрабатываются с помощью искусственного интеллекта и машинного обучения, а затем используются во многих приложениях, таких как обнаружение номерных знаков, обнаружение объектов, обнаружение движения, распознавание лиц и т. д.

В этой статье мы рассмотрим подключение наиболее часто используемого сейчас модуля камеры OV7670 к плате Arduino Uno. Аналогичным образом ее можно подключить и к плате Arduino Mega. Модуль камеры достаточно тяжел в подключении поскольку он имеет большое количество контактов. Также при использовании камеры достаточно важен выбор проводов, которыми вы ее подключаете, поскольку качество проводов может значительно влиять на качество картинки и уровень зашумленности видеоизображения.
Камера OV7670 работает от напряжения 3.3V, поэтому следует избегать прямого ее подключения к обычным контактам ввода/вывода Arduino, которые работают с напряжением 5V. OV7670 является камерой с буфером FIFO (first in, first out – первым пришел, первым вышел). Но в этом проекте мы будем захватывать изображения без использования данного буфера. Мы постарались максимально упростить данный проект чтобы его можно было повторить даже начинающим радиолюбителям.
Необходимые компоненты
Аппаратное обеспечение
- Плата Arduino Uno (купить на AliExpress).
- Модуль камеры (Camera Module) OV7670 (купить на AliExpress).
- Резистор 10 кОм – 2 шт. (купить на AliExpress).
- Резистор 4,7 кОм – 2 шт. (купить на AliExpress).
- Соединительные провода.
Программное обеспечение
Arduino IDE
Serial Port Reader (для анализа выходного изображения)
Некоторые особенности модуля камеры OV7670
OV7670 представляет собой модуль камеры с буфером типа FIFO. В настоящее время он производится несколькими фирмами и доступен с различной распиновкой. OV7670 обеспечивает полномасштабное (full frame) 8 битовое изображение в окне. OV7670 умеет работать с различными форматами видео изображения. В VGA разрешении камера обеспечивает до 30 кадров в секунду.
Модуль камеры OV7670 включает:
- массив датчиков изображений (разрешения примерно 656 x 488 пикселов);
- тактовый генератор;
- процессор обработки сигналов;
- аналого-цифровые преобразователи;
- генератор тестовых шаблонов;
- цифровой сигнальный процессор;
- устройство для масштабирования изображений;
- цифровой видео порт;
- светодиод и выход управления стробоскопической вспышкой.
Датчик изображения камеры OV7670 управляется с помощью шины SCCB (Serial Camera Control Bus — последовательная шина управления камерой) по протоколу I2C (контакты SIOC, SIOD) с максимальной частотой синхронизации 400 кГц.
Внешний вид модуля камеры OV7670 показан на следующих рисунках.

OV7670 модуль VGA камеры

Модуль камеры OV7670 (со снятой линзой)
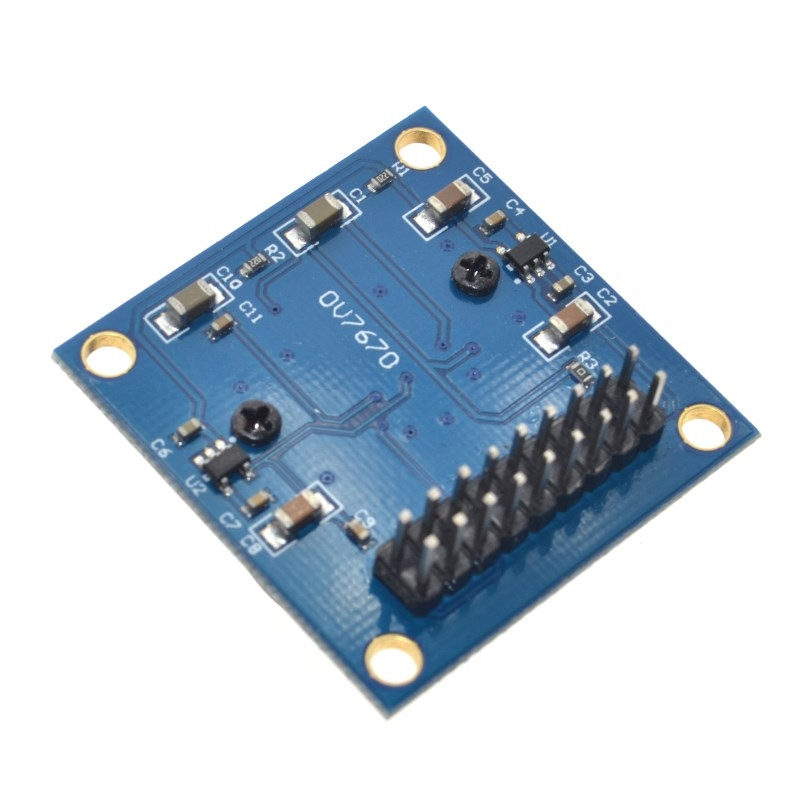
Модуль камеры OV7670 (нижняя сторона платы)
Камера использует следующие квитирующие (подтверждающие) сигналы:
- VSYNC : Vertical Sync Output (выход вертикальной синхронизации (для строк) – низкий уровень во время кадра;
- HREF : Horizontal Reference (горизонтальная синхронизация (для колонок) – высокий уровень во время активных пикселов ряда (строки);
- PCLK : Pixel Clock Output (пиксельная синхронизация (тактовый сигнал передачи байта из параллельного порта D0–D7) – независимый генератор синхронизирующих импульсов. Данные правильны на нарастающем фронте.
В дополнение к этому камера оперирует еще следующими сигналами:
- D0-D7 : параллельный цифровой 8-битный видеовыход в формате YUV/RGB;
- PWDN : Power Down Mode Selection — включение (лог. 0) и выключение (лог. 1) камеры;
- XCLK : внешнее тактирование (синхронизация);
- Reset : сигнал сброса.
Камера OV7670 синхронизируется с помощью генератора на 24 МГц. Это обеспечивает выход пиксельной синхронизации (PCLK) 24 МГц. Буфер типа FIFO имеет память на 3 Мбит. Генератор тестовых шаблонов формирует шаблон цветовых полос – с 8 полосами, с постепенным уменьшением к серому цвету (fade-to-gray).
Схема проекта
Схема подключения модуля камеры OV7670 к плате Arduino Uno представлена на следующем рисунке.

Внешний вид получившейся у нас конструкции проекта показан на следующем рисунке.

Объяснение программы для Arduino
Полный текст программы приведен в конце в статьи, здесь же мы рассмотрим его наиболее важные фрагменты.
Для работы с камерой OV7670 нам понадобится встроенная в Arduino IDE библиотека. Никаких внешних библиотек, которые необходимо скачивать, мы в этом проекте использовать не будем, только встроенные библиотеки.
После подключения в программе необходимых библиотек нам необходимо сконфигурировать регистры для работы с камерой OV7670.
Функция Setup() в нашем проекте будет включать все необходимые установки, необходимые для захвата изображений. Первой функцией, которую мы применим, будет arduinoUnoInut() – она используется для инициализации платы Arduino Uno. Она отключает все глобальные прерывания и устанавливает настройки для интерфейсов связи, такие как синхронизацию для ШИМ (широтно-импульсная модуляция), выбор контактов прерывания, настройки предделителя, добавление бита четности и стоповых битов.
Видеонаблюдение на ардуино
Дельта принтеры крайне требовательны к точности изготовления комплектующих (геометрия рамы, длины диагоналей, люфтам соединения диагоналей, эффектора и кареток) и всей геометрии принтера. Так же, если концевые выключатели (EndStop) расположены на разной высоте (или разный момент срабатывания в случае контактных концевиков), то высота по каждой из осей оказывается разная и мы получаем наклонную плоскость не совпадающая с плоскостью рабочего столика(стекла). Данные неточности могут быть исправлены либо механически (путем регулировки концевых выключателей по высоте), либо программно. Мы используем программный способ калибровки.
Далее будут рассмотрены основные настройки дельта принтера.
Для управления и настройки принтера мы используем программу Pronterface.
Калибровка принтера делится на три этапа:
1 Этап. Корректируем плоскость по трем точкам
Выставление в одну плоскость трех точек — A, B, C (расположенных рядом с тремя направляющими). По сути необходимо уточнить высоту от плоскости до концевых выключателей для каждой из осей.
Большинство (если не все) платы для управления трехмерным принтером (В нашем случае RAMPS 1.4) работают в декартовой системе координат, другими словами есть привод на оси: X, Y, Z.
В дельта принтере необходимо перейти от декартовых координат к полярным. Поэтому условимся, что подключенные к двигателям X, Y, Z соответствует осям A, B, C.(Против часовой стрелки начиная с любого двигателя, в нашем случае смотря на логотип слева — X-A, справа Y-B, дальний Z-C) Далее при слайсинге, печати и управлении принтером в ручном режиме, мы будем оперировать классической декартовой системой координат, электроника принтера сама будет пересчитывать данные в нужную ей систему. Это условность нам необходима для понятия принципа работы и непосредственной калибровки принтера. 
Точки, по которым мы будем производить калибровку назовем аналогично (A, B, C) и позиция этих точек равна A= X-52 Y-30; B= X+52 Y-30; C= X0 Y60. 
Алгоритм настройки:
- Подключаемся к принтеру. (В случае “крагозяб” в командной строке, необходимо сменить скорость COM порта. В нашем случае с 115200 на 250000 и переподключится)

После чего мы увидим все настройки принтера. - Обнуляем высоты осей X, Y, Z командой M666 x0 y0 z0.
И сохраняем изменения командой M500. После каждого изменения настроек необходимо нажать home (или команда g28), для того что бы принтер знал откуда брать отсчет. - Калибровка принтера производится “на горячую”, то есть должен быть включен подогрев стола (если имеется) и нагрев печатающей головки (HotEnd’а) (Стол 60град., сопло 185 град.) Так же нам понадобится щуп, желательно металлический, известных размеров. Для этих задач вполне подойдет шестигранный ключ (самый большой, в нашем случае 8мм, он предоставляется в комплекте с принтерами Prizm Pro и Prizm Mini)
- Опускаем печатающую головку на высоту (условно) 9мм (от стола, так, что бы сопло еле касалось нашего щупа, т.к. высота пока что не точно выставлена.) Команда: G1 Z9.
- Теперь приступаем непосредственно к настройке наших трех точек.
Для удобства можно вместо g- команд создать в Pronterface четыре кнопки, для перемещения печатающей головки в точки A, B, C, 0-ноль.


Далее командой меняем параметры высоты оси Y: M666 Y <посчитанная величина>
M666 Y0.75
M500
G28
2 Этап. Исправляем линзу
После того как мы выставили три точки в одну плоскость необходимо произвести коррекцию высоты центральной точки. Из за особенности механики дельты при перемещении печатающей головки между крайними точками в центре она может пройти либо ниже либо выше нашей плоскости, тем самым мы получаем не плоскость а линзу, либо вогнутую либо выпуклую. 
Корректируется этот параметр т.н. дельта радиусом, который подбирается экспериментально.
Калибровка:
- Отправляем головку на высоту щупа в любую из трех точек стола. Например G1 Z9 X-52 Y-30
- Сравниваем высоту центральной точки и высоту точек A,B,C. (Если высота точек A, B, C разная, необходимо вернутся к предыдущей калибровки.)
- Если высота центральной точки больше остальных, то линза выпуклая и необходимо увеличить значение дельта радиуса. Увеличивать или уменьшать желательно с шагом +-0,2мм, при необходимости уменьшить или увеличить шаг в зависимости от характера и величины искривления (подбирается экспериментально)
- Команды:
G666 R67,7
M500
G28 - Подгоняем дельта радиус пока наша плоскость не выровняется
3 Этап. Находим истинную высоту от сопла до столика
Третьим этапом мы подгоняем высоту печати (от сопла до нижней плоскости — столика) Так как мы считали, что общая высота заведомо не правильная, необходимо ее откорректировать, после всех настроек высот осей. Можно пойти двумя путями решения данной проблемы:
1 Способ:
Подогнав вручную наше сопло под щуп, так что бы оно свободно под ним проходило, но при этом не было ощутимого люфта,
- Командой M114 выводим на экран значение фактической высоты нашего HotEnd’а
- Командой M666 L получаем полное значение высоты (Параметр H)
- После чего вычитаем из полной высоты фактическую высоту.
- Получившееся значение вычитаем из высоты щупа.
Таким образом мы получаем величину недохода сопла до нижней плоскости, которое необходимо прибавить к полному значению высоты и и записать в память принтера командами:
G666 H 235.2
M500
G28
2 Способ:
Второй способ прост как валенок. С “потолка”, “на глаз” прибавляем значение высоты (после каждого изменение не забываем “уходить” в home), добиваясь необходимого значения высоты, но есть шанс переборщить со значениями и ваше сопло с хрустом шмякнется об стекло.
Как сделать авто калибровку для вашего принтера и что при этом авто калибрует принтер вы узнаете из следующих статей.
roboforum.ru
Технический форум по робототехнике.
- Список форумов‹Тематические разделы‹Arduino и другие Xduino
- Изменить размер шрифта
- Версия для печати
- Магазин
- Правила
- Wiki
- FAQ
- Регистрация
- Вход
Arduino+wi-fi+веб-камера
Arduino+wi-fi+веб-камера
ArmagedDance » 04 фев 2011, 21:18
Хотим с другом собрать робота, управляемого через wi-fi и который будет снабжен веб-камерой. Управление планируется осуществить через специальную программу, через которую можно будет принимать видео-поток от робота, получать информацию о состоянии, а также пересылать команды движения и пр. В программировании и в электроннике познания есть, в роботостроении — пока минимальный.
После взвешивания всех возможных вариантов остановились на Arduino (скорее всего — Arduino Mega 2560). В качестве wi-fi адаптера подумываем использовать cosmo-wifi — http://jt5.ru/shields/cosmo-wifi/
Возник вопрос о том, как реализовать подключение usb-вебкамеры к arduino напрямую.
Я так понимаю, потребуется как минимум 3 различных модуля Arduino. Первый — cosmo wi-fi для связи, второй — с USB-входом — для подключения web-камеры, третитьй — для управления движением и другими компонентами (подумываем о реализации подвижной веб-камеры на сервоприводах на самом роботе).
Re: Arduino+wi-fi+веб-камера
=DeaD= » 04 фев 2011, 21:21
Re: Arduino+wi-fi+веб-камера
ArmagedDance » 04 фев 2011, 21:28
Re: Arduino+wi-fi+веб-камера
=DeaD= » 04 фев 2011, 21:31
Или ставить что-то полноценное с производительностью уровня КПКПК, либо забыть про вебкамеру.
Добавлено спустя 22 секунды:
Есть же готовые WiFi-камеры, есть дешевые китайские аналоговые радиокамеры.
Re: Arduino+wi-fi+веб-камера
Prometheus » 08 фев 2011, 14:01
Возможно, просто имеет смысл вместо «классической» платы Ардуино, использовать более мощную платку.
Например — FEZ Domino или что по-мощнее, смотрите сами.
Re: Arduino+wi-fi+веб-камера
Стрэнж » 17 фев 2011, 20:14
Re: Arduino+wi-fi+веб-камера
qu100 » 03 мар 2011, 19:11
проще думаю купить поворотную IP-камеру у китайцев.
и приделать ее на платформу с колесами.
вместо управления поворотом-наклоном можно приделать управление моторами платформы.
в качестве шасси лучше использовать танк, у него разворот на месте.
типа такой игрушки, за 50 долл.
http://www.nix.ru/autocatalog/rc_models . 43972.html
остается решить вопрос с аккумуляторами и общим зарядным устройством. про это еще не думал.
Re: Arduino+wi-fi+веб-камера
palagnyukvovan » 26 дек 2012, 15:59
Re: Arduino+wi-fi+веб-камера
Merl1n » 12 мар 2016, 11:13
Re: Arduino+wi-fi+веб-камера
lorry » 13 мар 2016, 03:45
Re: Arduino+wi-fi+веб-камера
elmot » 13 мар 2016, 11:12
Re: Arduino+wi-fi+веб-камера
avovana » 13 мар 2016, 19:55
Подскажи, пожалуйста!
Во-первых, это большая удача, что я тебя нашел!
Я немного изучал связку Колесная платформа Arduino TP-LINK TL-MR3020 Камера USB .
Я понимаю, что могу повторить данный проект в том числе благодаря твоему труду.
Однако я хочу немного другого. Подскажи, направь, скажи, вообще возможно ли это.
Я, начинающий программист C++, хотел бы сделать следующее.
Написать программу на C++, которая бы:
1) Общалась с несколькими роботами по wi-fi.
2) Скидывала бы на сервер видео с роботов и еще какие-нибудь параметры, измеряемые Arduin’ой.
У меня сложность в прошивки TP-LINK TL-MR3020 , т.к. с роутэрами я никогда не работал, да и вообще с сокетами.
А мне надо получать и видео по wi-fi с роутера, и параметры, и самому посылать управляющие сигналы на роутер.
Т.е., как я понимаю, мне нужно самому какую-то прошивку для роутера писать?
Re: Arduino+wi-fi+веб-камера
elmot » 14 мар 2016, 01:07
Re: Arduino+wi-fi+веб-камера
avovana » 14 мар 2016, 21:33
Arduino Home, умный дом на Arduino, Часть #2
Делаем умный дом на Arduino: с чего начать?
Создание умного дома своей головой и своими руками — это очень занимательный процесс. Пока вы будете заниматься его разработкой и настройкой, вам предстоит пополнить свою копилку знаний во многих областях: электронике, схемотехнике, программировании и многих других.

Первую часть из цикла статей читайте здесь
Если вы мастер на все руки и отличный самоучка, то процесс пойдет быстрее, если же нет — то придется немножко попотеть.
Сама идея базирования умного дома на платформе микроконтроллера не нова и не так сложна, как может показаться на первый взгляд. Данный цикл статей не призван научить вас повторить такой же проект у себя дома, а имеет цель рассказать основные принципы на которых строится умный дом со всеми его составляющими: контроллером, исполнительными устройствами, модулями коммутации и т.д.
Все существующие системы умного дома имеют собственные контроллеры и собственные функции, подчеркивающие их отличие от конкурентов, но принцип работы всегда остается примерно одинаковым.
Таким образом вы сможете самостоятельно повторить данный проект, а в дальнейшем сделаете это на другой платформе, так как часто мощностей одной только Arduino вам будет не хватать, и вы начнете рассматривать иные варианты.
В зависимости от выбранного вами контроллера будет меняться уровень необходимых знаний для настройки и взаимодействия между собой всех компонентов системы (имеется ввиду язык программирования, на котором будет написан код для загрузки в контроллер).
Официально самые первые умные дома появились еще в 1978 году и самой первой их функцией была возможность управлять освещением: плавно менять уровень освещенности в лампочках в зависимости от времени суток или рода деятельности. Все это производилось при помощи регуляторов напряжения — диммеров. Благодаря их повсеместному использованию росла энергоэффективность в домах (экономия электроэнергии достигала уровня в 20-30%).
Уже в дальнейшем появилось множество датчиков, которые позволяли контролировать различные величины и процессы в доме, например, температуру, влажность, содержание вредных веществ (пыли или углекислого газа).
Датчики выполняют роль мониторинга. Сигналы с них передаются на контроллер, где происходит обработка полученной информации и отправка соответствующих команд исполнительным устройствам (клапаны, таймеры, модули реле, приводы).
Простым примером здесь служит система “климат-контроль”: датчик температуры зафиксировал, что показатель температуры и влажности воздуха в помещении превышает допустимое значение — сигнал с этой информацией передается на контроллер, который решает включить исполнительное устройство, отвечающее за включение/выключение вентилятора. Вентилятор будет работать до тех пор, пока данные с датчика температуры не будут приведены в норму.
Умный дом имеет очень много возможностей и функций, и только от вас зависит, что именно будет в вашей собственной системе.

Отвечая на вопрос “С чего начать?” нужно определиться с тем, каков набор функций, который вы будете использовать для своих нужд и целей.
После этого нужно составить список компонентов, которые необходимо приобрести.
Для удобства разделим их на несколько групп:
1. Контроллер
С этим мы уже определились — будем использовать Arduino. Для новичков это идеальный вариант: открытая среда разработки, множество примеров и исходников в открытом доступе, библиотеки, упрощающие разработку, и несложный язык программирования (в Arduino используется wiring, представляющий собой упрощенный C++ . О том, насколько легко его понять говорит тот факт, что Arduino занимаются даже ученики начальных классов в школах робототехники).
2. Сервер
О том, что это такое уже рассказывалось в первой части цикла. Повторимся — сервер связывает контроллер с исполнительными устройствами, обеспечивая обмен сигналами между ними. Конечно, сервер может и не понадобиться, если вы используете проводной способ связи между всеми модулями системы.
Сервер необходим для управления умным домом посредством удаленного доступа.
Платформа Arduino напрямую работать удаленно с другими устройствами не может (иными словами не может передавать информацию на расстоянии), поэтому ей необходимо дополнение, работающее с интернетом.
Отличный вариант — подключение к плате Arduino платы расширения Ethernet Shield (интернет шилд). Подключение происходит через UART интерфейс. Начинающим с ним будет работать довольно просто, поскольку в него встроена библиотека, упрощающая написание кода и работу с шилдом. Другим, но чуть более сложным вариантом будет взаимодействие Arduino с отдельным Wi-Fi модулем на базе ESP8266.
3. Устройства мониторинга и анализа
Как уже было сказано ранее, количество данного типа устройств зависит от того, какие именно задачи будет выполнять ваш умный дом. Разберем несколько примеров.
- Контроль за оптимальным режимом температуры
Для этой цели вам понадобятся хорошие датчики температуры. Могу порекомендовать датчики Dallas DS18B20. Они обладают достаточной для комнатных условий точностью (точнее, чем датчики семейства DHT), быстродействием и способны показывать температуру как в фаренгейтах, так и в цельсиях. Они будут считывать информацию о текущей температуре и передавать данные на Arduino.
- Содержание углекислого газа в помещении.
Используйте датчики газа, чтобы мониторить состояние качества воздуха.
4. Исполнительные устройства
Название говорит само за себя. В умных домах они предназначаются для выполнения полученных от контроллера команд. Пример также приводил на страницах этой статьи: если температура превысит норму, то Arduino (в нашем случае) отдает команду исполнительному устройству (в данном случае им может быть твердотельное реле) включить кондиционер или вентилятор для ее установления на заданном уровне.
Также в зависимости от того, какие задачи вы хотите поручить вашему умному дому, зависит и приобретение вами соответствующих исполнительных устройств. Опять же напишу для примера: различные приводы можно использовать для автоматического открытия окон, а клапаны для регулирования уровня подачи воды.
5. Компоненты для коммутации (обеспечивают взаимодействие всех составляющих умного дома)
К таковым можно отнести различные провода, перемычки, предохранители, выключатели и многое другое.
Поэтому прежде, чем начинать разработку умного дома, внимательно продумайте какие компоненты вам нужны, на базе какого контроллера вы будете реализовывать это и уложитесь ли вы в бюджет.

На этом вторая часть нашего цикла статей про умный дом подошла к концу. Всем спасибо за внимание, продолжение следует.