Датчики линейного перемещения принцип работы
Датчики линейного перемещения – основные нюансы
Классификация приборов
Датчики линейного перемещения имеют несколько классификационных уровней, но основным является принцип действия, который определяет функциональное назначение и область использования приборов.

- Область применения датчиков ↓
- Емкостные датчики ↓
- Индукционные датчики ↓
- Оптические и оптоэлектронные приборы контроля перемещений ↓
- Производители различного типа приборов ↓
- Прибор контроля перемещения своими руками ↓
По принципу действия приборы контроля и измерения перемещений можно разделить на:
- Емкостные.
- Оптические (оптоэлектронные).
- Индукционные.
- Датчики магнитострикционного типа.
- Ультразвуковые.
- Резистивные, магниторезистивные и потенциометрические.
- Приборы, использующие в своей работе эффект Холла в быту, практически не используются.
Область применения датчиков
Любой датчик движения, вне зависимости принципа действия, предназначен для преобразования линейного перемещения в цифровой или аналоговый сигнал, который затем поступает к электронному блоку измерения или срабатывания. От принципа действия зависит точность измерения.
Часто нет необходимости в замере конкретной величины перемещения. Например, в охранных системах достаточно просто определить наличие перемещения в зоне контроля. Эти приборы получили название датчиков движения. От них не требуется высокая точность замера величины. Поэтому дешевые емкостные, оптические или индукционные устройства здесь наиболее распространены.
В промышленно-производственных системах автоматического управления требуется измерения величины перемещения. Причем измерение (например, в станках с числовым программным управлением) должно быть проведено с высокой точность и осуществляется или непрерывно, или дискретно – через определенные промежутки времени. В этом случае наибольшее распространение получили магнитострикционные приборы.

Емкостные датчики
Простейший емкостный датчик по своей конструкции напоминает конденсатор. При движении контролируемого объекта его емкость может изменяться путем:
- Изменения величины зазора между пластинами.
- Изменения взаимного положения пластин и как следствие этого увеличения (уменьшения) зоны взаимного перекрытия.
- Изменения диэлектрической проницаемости изолирующего слоя.
При изменении емкости устройства эта величина может сама по себе служить сигналом, передаваемый к электронным блокам управления, а может включать генератор импульсов, которые более просто поддаются дальнейшей обработке.

Наибольшее распространения емкостные устройства контроля перемещения нашли:
- В качестве источника сигнала в системах контроля заполнения резервуаров жидким или порошкообразным продуктом.
- Как прибор, контролирующий начало – окончание рабочего хода исполнительного органа робототехнических систем и автоматических станков и линий.
- Для позиционирования различных объектов.
- Как обычный конечный бесконтактный выключатель.
- В системах контроля и охранной сигнализации как «датчик присутствия».
Благодаря своей невысокой стоимости и надежности, емкостные устройства нашли самое широкое распространения в отдельных системах комплекса жизнеобеспечения «умный дом».
К их достоинствам, по сравнению с устройствами, использующими другой принцип действия, можно отнести:
- Упрощенную технологию массового производства, с использованием недорогих, широко распространенных материалов.
- Высокую чувствительность при малом энергопотреблении.
- Компактные размеры и незначительный вес.
- Долговечность, простоту и надёжность эксплуатации.
- Простоту адаптирования устройства к решению различных задач и возможность встраивания в любую конструкцию.
Основными факторами, сдерживающими широкое применение в высокоточных системах управления, являются:
- Относительно низкий коэффициент преобразования.
- Необходимость тщательной экранировки элементов датчика.
- Повышение точности работы прибора на более высоких частотах по сравнению с промышленной частотой в 50,0 герц.
- Высокая вероятность ложных срабатываний при изменении атмосферных условий (снег, дождь) что требует повышенной защиты источника сигнала.
Индукционные датчики
Сигнал в индукционных датчиках формируется за счет изменения индуктивности катушки. Приборы этого типа отличаются высокой точностью, при незначительных габаритах. Индукционные приборы контроля способны проводить измерения дистанционно, а по типу их подразделяют на простые и дифференциальные.

Одно из конструктивных исполнений этих устройств представляет собой трансформатор, сердечник которого имеет возможность передвигаться. При перемещении сердечника индуктивность катушки меняется и это изменение является сигналом. Значение индуктивности изменяется пропорционально уровня перемещения сердечника.
Если контроль перемещения осуществляется в отношении ферримагнитных объектов, то сердечник не требуется. Деталь, попадая в поле электромагнитного излучения катушки, меняет ее индуктивность и формирует управляющий сигнал.
Контролирующие датчики индукционного типа нашли широкое применение в станках с программным управлением, бесконтактных системах охраны и для фактического измерения перемещения, с отчетом его значения по цифровой шкале или с выводом информации на экран жидкокристаллического дисплея.
Оптические и оптоэлектронные приборы контроля перемещений
Набольшее распространение для контроля движения и измерения расстояния получили оптические триангуляторы, являющиеся по своей сути обычным оптическим (лазерным) дальномером. Для контроля малых изменений линейных величин применяются приборы с поляризационной решеткой. Кроме того, оптические датчики широко используются в системах охраны в качестве «лучевого барьера».
К достоинствам этой категории приборов можно отнести:
- Реализацию бесконтактного контроля.
- Высокую точность.
- Практически мгновенно формирование управляющего сигнала (отсутствие времени задержки срабатывания).
Недостатками высокоточных оптических датчиков считаются:
- Значительная стоимость.
- Критичность к условиям окружающей среды.
Производители различного типа приборов
Крупнейшим российским производителем приборов для контроля перемещений является компания «ЭЛТЕХ» (Санкт-Петербург), специализирующая на устройства для контроля и измерения величины линейного перемещения индуктивного, резистивного и емкостного типа.
Линейные потенциометры модельных линий «Longfellow-2» и «DuraStar» обеспечивает измерение величины перемещения в пределах до 610,0 миллиметров с точностью 0,5%. Стоимость приборов зависит от измеряемого диапазона (модели) и объема поставки и оговаривается при заказе.

В последнее время большой популярностью пользуется недорогие, но достаточно точные приборы китайского производства.
Наиболее распространены следующие модели:
- «DEPP EP15-series» – приборы индукционного типа, применяемые в станках и системах автоматического контроля;
- Оптическое устройство «HENGXIA K100-series» позволяет контролировать размеры в диапазоне 50,0…7200,0 миллиметров;
- Линейный энкодер «Roundss Rlc50d» по сути является электронной рулеткой, позволяющей с высокой точностью замерять размеры и контролировать пройденный путь.
Стоимость китайской продукции зависит от курсовой стоимости рубля и уточняется при заказе.
Прибор контроля перемещения своими руками
Прибор для измерения величины перемещения изготовить самостоятельно практически невозможно. Однако радиолюбители достаточно часто собирают из вышедшей из строя радио и электронной аппаратуры датчики движения, которые с успехом используются в системах безопасности и жизнеобеспечения.
Например, датчик можно использовать для включения света в туалете, когда в помещение санузла заходит человек. Не менее популярны подобные устройства для включения-отключения освещения в жилых помещениях.
И конечно эти приборы незаменимы при формировании собственной системы безопасности, где они фиксируют любую попытку (неважно человек это или животное) несанкционированного проникновения на территорию защищаемого объекта (садового участка, балкона, гаража). Изготовление самодельного датчика движения рассмотрим на примере сборки оптоэлектронного устройства, контролирующего пересечение охраняемого периметра.
Из деталей для изготовления самого прибора потребуются:
- Блок питания от мобильного телефона с напряжением на входе 5,0 вольт.
- Фотоэлемент – лучше фоторезистор.
- Биполярный транзистор с «p-n-p» – переходом.
- Построечный потенциометр (сопротивление) с диапазоном регулировки 0…10,0 килоом.
- Электромагнитное реле, срабатывавшее при напряжении 5,0 вольт.
- В качестве источника излучения идеально подойдет лазерная указка, дающая тонкий, узконаправленный луч.
Порядок соединения схемы следующий:
- Катод фотоэлемента припаивается к плюсовому проводнику блока питания – эта точка будет является общим (массовым) проводником.
- К аноду фотоэлемента присоединяется просторечный потенциометр, при выведении его движка в среднее положение.
- Свободный контакт потенциометра припаивается к отрицательному проводнику блока питания, а контакт от его движка к базе транзистора.
- Эмиттер транзистора включается подсоединяется к общему «плюсу» схемы, а коллектор соединяется с одним из контактов реле.
- Второй контакт реле припаивается к отрицательному проводу блока питания.
При освещении окошка фотоэлемента лазерной указкой, поворотом движка потенциометра добиваются надежного срабатывания реле. К коммутационным контактам реле можно подключить любой источник сигнала – ревун, лампу накаливания, светодиодный индикатор. Недостатком данного устройства является то, что оно срабатывает только при пересечении луча света.
То есть в режиме ожидания все его элементы функционируют. При различных способах коммутации контактов реле можно добиться включения света при первом пересечении луча и его отключении при повторном.
Принцип действия магнитострикционных датчиков линейных перемещений Micropulse и Temposonics
Магнитострикционные преобразователи линейных перемещений или, как их еще называют: измерители пути, датчики линейного положения и т.п. получили самое широкое распространение в различных отраслях промышленности для автоматизации производственных процессов. Определение положение объекта, движущегося вдоль одной оси – очень часто встречающаяся задача в автоматизации. При этом, положение необходимо чаще всего определять в самых тяжелых условиях эксплуатации: постоянной вибрации, ударных нагрузках, при высоком давлении, низких или высоких температурах, высокой влажности. Деревообрабатывающие станки, гидроцилиндры, инжекционное литье, термопластавтоматы, резка различных материалов, подвижная техника – вот неполный перечень конкретных примеров применения датчиков преобразователей линейных перемещений. И под все эти варианты прекрасно подходят измерители, функционирующие на магнитострикционном принципе измерения. На сегодня, самыми популярными на рынке являются датчики линейных перемещений от компаний Balluff (Германия), бренд Micropulse, Novotechnik (Германия) и MTS Sensors (США), бренд Temposonics. Как они работают, расскажем доступным языком в нашей статье ниже.

Основой принципа магнитострикции являются магнитомеханические свойства ферромагнитных материалов: железо, никель, кобальт, а так же их сплавов. При нахождении ферромагнетика в магнитном поле, оно вызывает микроскопическую деформацию его структуры, приводящее к изменению физических размеров ферромагнетика. Это является следствием структуры ферромагнитного материала, проще говоря, он состоит из огромного количества микроскопических элементарных магнитов, которые стремятся установиться параллельно друг другу в пределах ограниченных областей, так называемых «доменах». В обычном состоянии направление доменов хаотично, однако, при наложении магнитного поля они выстраиваются по его направлению и выравниваются параллельно друг другу. При этом, возникают собственные магнитные поля, которые могут превосходить внешнее магнитное поле в сотни раз. Вышеописанное приводит к тому, что если стержень из ферромагнитного сплава поместить в магнитное поле параллельное его оси, то стержень получит механическую деформацию, вследствие которой возникнет удлинение. Надо понимать, что на самом деле это удлинение очень мало (см. рисунок 1), однако, его возможно зарегистрировать. Кроме того, создавая специальные ферромагнитные сплавы и прилагая к ним постоянные направленные магнитные поля можно оптимизировать и управлять магнитострикционным эффектом.
 Теперь мы подошли вплотную к тому, что происходит в датчиках преобразователях линейных перемещений, таких как Temposonics или Micropulse. В данных измерителях пути применяется эффект Видемана, который описывает механическую деформацию ферромагнитного стержня, находящегося под воздействием двух магнитных полей: внешнего и внутреннего, создаваемого проводником, по которому протекает электрический ток. В магнитострикционных датчиках линейных перемещений MTS Sensors Temposonics и Balluff Micropulse внешнее магнитное поле создается специальным позиционным магнитом, которое при пересечении с внутренним концентрическим магнитным полем, создаваемым электрическим током, вызывает механическую деформацию в небольшой области измерительного элемента в форме стержня. Так же используется магнитоупругий эффект (эффект Виллари), связанный с изменением магнитных свойств ферромагнетика, например, намагниченности ферромагнитного бруска, которое вызывается продольной деформацией.
Теперь мы подошли вплотную к тому, что происходит в датчиках преобразователях линейных перемещений, таких как Temposonics или Micropulse. В данных измерителях пути применяется эффект Видемана, который описывает механическую деформацию ферромагнитного стержня, находящегося под воздействием двух магнитных полей: внешнего и внутреннего, создаваемого проводником, по которому протекает электрический ток. В магнитострикционных датчиках линейных перемещений MTS Sensors Temposonics и Balluff Micropulse внешнее магнитное поле создается специальным позиционным магнитом, которое при пересечении с внутренним концентрическим магнитным полем, создаваемым электрическим током, вызывает механическую деформацию в небольшой области измерительного элемента в форме стержня. Так же используется магнитоупругий эффект (эффект Виллари), связанный с изменением магнитных свойств ферромагнетика, например, намагниченности ферромагнитного бруска, которое вызывается продольной деформацией.
 Физика процесса, изложенная выше, должна превратиться в надежную измерительную систему. И после долгих поисков и испытаний, магнитострикционные датчики получили общую конструкцию, схематично представленные на рисунке №3. Преобразователи линейных перемещений имеют несколько основных частей:
Физика процесса, изложенная выше, должна превратиться в надежную измерительную систему. И после долгих поисков и испытаний, магнитострикционные датчики получили общую конструкцию, схематично представленные на рисунке №3. Преобразователи линейных перемещений имеют несколько основных частей:
-измерительный элемент в виде волновода;
-блок электроники;
-позиционный магнит;
-преобразователь торсионного импульса;
-демпфер в конце стержня, в которой происходит гашение второй части торсионного импульса.
Измерительным элементом является ферромагнитный волновод, по которому распространяется торсионная ультразвуковая волна, детектируемая преобразователем торсионного импульса. Позиция объекта измерения определяется положением постоянного магнита, который окружает волновод. Позиционный магнит связан с объектом измерения, однако, магнитом и измерительным элементом — волноводом, полностью отсутствует механическая связь. По сути, это бесконтактный принцип измерения, а значит он обладает высокой надежностью и не имеет механического износа. Если говорить о габаритах волновода, то его наружный диаметр составляет около 0.7 мм, а внутренний около 0.5 мм Внутри волновода находится медный проводник. Сам измерительный процесс начинается с короткого токового импульса по медному проводнику из блока электроники. С перемещением импульса возникает радиальное магнитное поле вокруг волновода (рисунок №3). При пересечении с магнитным полем постоянного позиционного магнита, возникает, согласно эффекту Видемана, пластическая деформация магнитострикционного волновода, и ультразвуковая торсионная волна, которая распространяется от места возникновения в оба конца волновода. В одном из концов которая полностью гасится, исключая помехи и искажения сигнала. Скорость распространения этой волны в волноводе составляет 2830 м/с, и на нее не практически не оказывает никакого влияния внешние факторы (загрязнения, температура, удары и т.д.). Детектирование и обработка торсионного импульса происходит на другом конце волновода в блоке электроники. Преобразователь торсионных импульсов состоит из расположенной поперек волновода и жестко связанной с ним полосы из магнитострикционного металла; детектирующей катушки индуктивности и одного неподвижного постоянного магнита.
В преобразователе торсионного импульса, сверхзвуковая волна вызывает изменение намагниченности металлической полосы согласно эффекта Виллари, уже упоминавшемуся. Следующее из этого временное изменение поля постоянного магнита индуцирует электрический ток катушке индуктивности. Этот возникающий электрический сигнал окончательно обрабатывается электроникой датчика. Точное определение позиции получается измерением времени между стартом токового импульса и времени возникновения ответного электрического сигнала, которое определяется в преобразователе торсионных импульсов при детектировании ультразвуковой волны.
При кажущейся внешней сложности принципов измерения датчиков линейных перемещений Novotechnik, Temposonics и Micropulse, очевидны преимущества, которыми обладают эти преобразователи: измерение расстояния с максимальной точностью, долговременные и стабильные характеристики и параметры, высокая защищенность и стойкость к внешним воздействиям.

Надо понимать, воплощение принципов и физических эффектов в конечный надежный и точный прибор, готовый к работе в самых тяжелых условиях, ставит самые высокие требования к возможностям и компетенции
производителя. Инженеры должны обладать фундаментальными физическими знаниями, накопленными за годы исследований и испытаний. К примеру, прежде чем подобрать оптимальный вариант схемы преобразователя торсионных импульсов, были исследованы и испытаны различные варианты, представленные на рисунке №4. Оказалось, что оптимальная конструкция преобразователя должна быть такой, как на варианте 3. Именно так получается наиболее уверенный и точный сигнал, так как регистрируется только торсионная часть механической волны, а продольные колебания не оказывают влияния на результат измерения. Применение торсионных волн и регистрирующей системы, которая реагирует только на торсионную волну, позволяет не бояться влияния вибрации на процесс измерения, так как торсионный импульс нельзя вызвать внешней механической вибрацией. Для того, чтобы все физические процессы принципа измерения могли протекать без влияния со стороны внешних воздействий, производитель использует специальные механическую конструкцию корпуса и электронную схему при обработке сигнала. Производители магнитострикционных датчиков линейных перемещений Novotechnik, MTS Sensors Temposonics и Balluff Micropulse постоянно совершенствуют материалы используемые в своих продуктах, а так же улучшают схемы и конструкцию. Правильность выбранного направления производителей и оптимальность первоначальной конструкции магнитострикционных преобразователей Temposonics и Micropulse, подтверждают регулярно встречающиеся работоспособные датчики, старых поколений, установленные и прослужившие от пяти до десяти лет в условиях постоянной промышленной эксплуатации.
Принцип работы индуктивных датчиков перемещения
Предлагаем Вам ознакомиться с физическими основами работы индуктивных датчиков перемещения производства компании RDP Electronics Ltd (United Kingdom), с их основными параметрами, преимуществами и сферами применения.
Сам термин LVDT (Linear Variable Differential Transformer) — означает линейный дифференциальный трансформатор с переменным коэффициентом передачи.
Рассмотрим принцип работы датчиков на LVDT технологии.
Первичная возбуждающая обмотка
Вторичная обмотка 1
Вторичная обмотка 2
Результирующий сигнал от суммы вторичных обмоток
В принципе имеется две схемы работы — с выходным напряжением и выходным током.
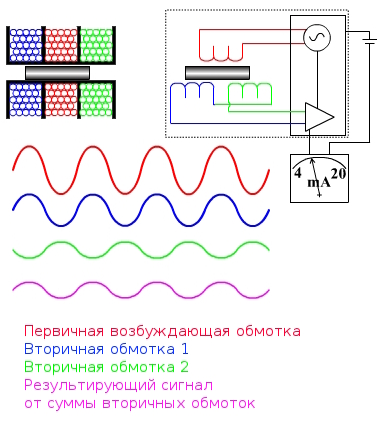 Схема работы с выходным током (4-20мА) |
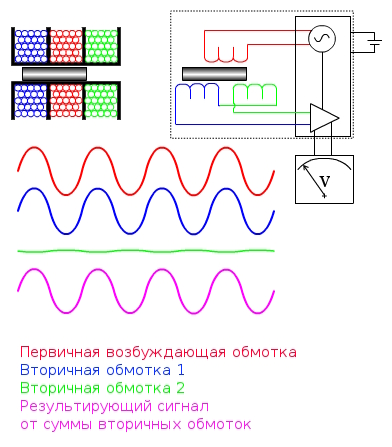 Схема работы с выходным напряжением |
Рассмотрим более детально сам процесс измерения перемещения.
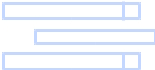
Датчик перемещения, работающий по технологии LVDT, состоит из трех обмоток трансформатора — одной первичной и двух вторичных. Степень передачи тока между первичной и двумя вторичными обмотками определяется положением подвижного магнитного сердечника, штока. Вторичные обмотки трансформатора соединены в противофазе.
При нахождении штока в середине трансформатора, напряжение на двух вторичных обмотках равны по амплитуде, а т. к. они соединены противофазно, суммарное напряжение на выходе равно нулю — перемещения нет.
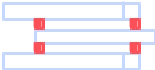
Если шток перемещается от серединного положения в какую либо сторону — происходит увеличение напряжения в одной из вторичных обмоток и уменьшение в другой. В результате суммарное напряжение будет не нулевым — датчик будет фиксировать смещение штока.
Соотношение выходной фазы сигнала по сравнению с фазой возбуждающего сигнала дает возможность электронике понять, в какой части обмотки находится в данный момент шток.
Основная особенность принципа работы индуктивных датчиков перемещения состоит в том, что прямой электрический контакт между чувствительным элементом и трансформатором отсутствует (связь осуществляется через магнитное поле), что дает пользователям абсолютные данные по перемещению, теоретически бесконечную точность разрешения и очень долгий срок службы датчика.
Особенности схемы работы с выходным током — т. к. цепь генератор/демодулятор встроена в сам датчик перемещения и питается от выходного тока 4-20 мА, то нет необходимости во внешнем оборудовании для формирования сигнала.
Особенности схемы работы с выходным напряжением — цепь генератор/демодулятор, встроенная в датчик перемещения обеспечивает возбуждение и преобразует сигнал обратной связи в напряжение постоянного тока. При этом так же не требуется внешнее оборудование для формирования сигнала.
Особенности измерения выходного сигнала.
1) Если выходное напряжение измеряется не фазочувствительным (среднеквадратичным) вольтметром, то отклонение штока в любую сторону от центрального положения в трансформаторе датчика будет соответствовать увеличению выходного напряжения.
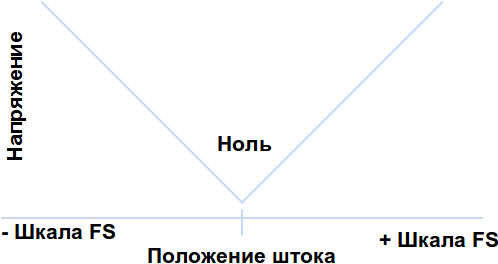
Заметим, что кривая не касается горизонтальной оси. Это происходит из-за остаточного выходного напряжения.
2) Если используется фазочувствительная демодуляция, то по выходному сигналу можно судить, в какой части трансформатора находится шток в данный момент.
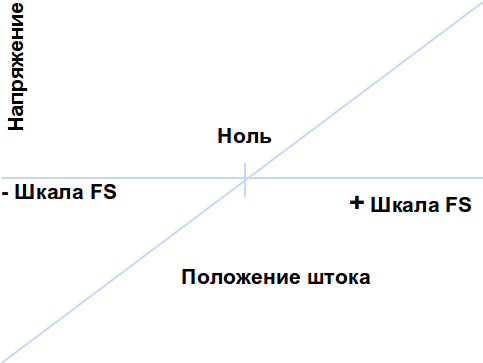
Для формирования сигнала всегда используется фазочувствительная демодуляция, т.к. это исключает влияние на выходной сигнал остаточного выходного напряжения и позволяет пользователю знать положение штока в трансформаторе.
Диапазон линейности индуктивного датчика перемещения.
Если мы рассмотрим выходную кривую вне механического диапазона типичного LVDT датчика, то можно заметить, что на краях диапазона кривая изгибается. Это значит, что механический диапазон существенно шире линейного участка работы.
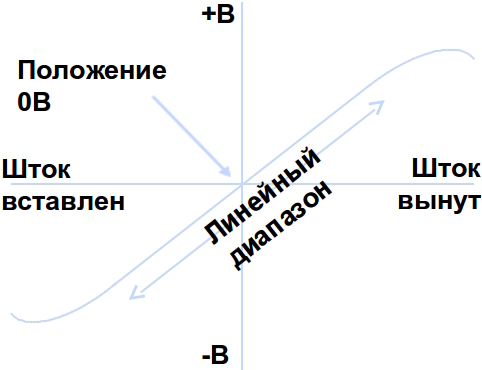
При калибровке датчика, важно, что электрическая нулевая точка используется в качестве ссылки, и что датчик используется в пределах ± FS (полного диапазона) вокруг электрического нулевом положения.
Если проводить калибровку не беря за основу точку ноля вольт, одно из положений полного диапазона будет за пределами линейного диапазона и, следовательно, может привести к ошибке линейности.
Типы индуктивных датчиков перемещения
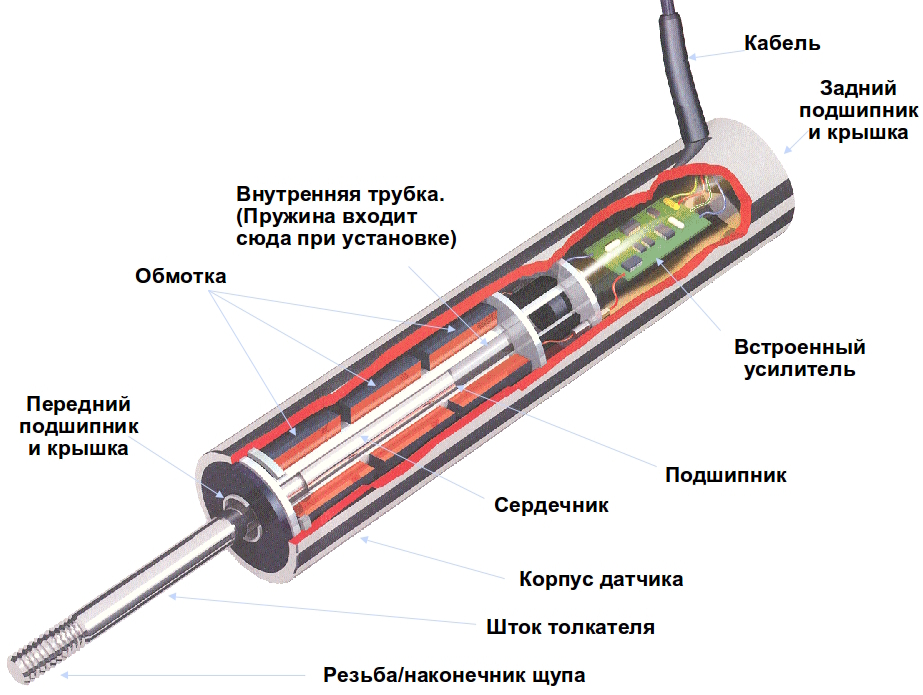
Тип 1 — несвязанные преобразователи, которые имеют якорь, который отделен от тела корпуса. Части датчика должны быть установлены таким образом, что якорь не прикасался к внутренней трубке корпуса. Сделав это, можно получить абсолютное отсутствие трения при движении чувствительного элемента датчика.
Тип 2 — монолитные преобразователи, которые имеют тефлоновый подшипник, который направляет якорь (шток) по внутренней трубке.
Тип 3 — монолитные преобразователи с возвратной пружиной, которая толкает якорь (шток) наружу.
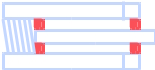
Внутреннее строение типичного индуктивного датчика перемещения LVDT
Преимущества индуктивных датчиков перемещения LVDT
1. Преимущества над линейными потенциометрами (POTS).
- Не имеют контакта корпуса и внутренних деталей с чувствительным элементом, что означает, что нет никакого износа при движении штока. POTS датчики имеют контакт с чувствительным элементом и могут быстро изнашиваются, особенно под воздействием вибрации.
- Можно легко обеспечить защиту от влаги и пыли на требуемом уровне, даже стандартные версии LVDT датчиков обычно имеют гораздо лучший уровень защиты от внешний воздействий, чем POTS.
- Вибрация не вызывает влияния на пропадание сигнала, в отличие от POTS, где скользящий бегунок может прервать контакт с проводником при вибрации.
2. Преимущества над магнитострикционными датчиками.
- Не восприимчивы к ударам и вибрации.
- Менее восприимчивы к паразитным магнитным полям окружающей среды.
- Система формирования сигнала может быть удалена от чувствительного элемента на некоторое расстояние, что позволяет использовать датчики при работе с высокой температурой и высоким уровнем радиации.
- Магнитострикционные датчики не имеют короткого штока ±100мм или менее, а это как раз наиболее востребованный диапазон технического применения датчиков перемещения.
3. Преимущества над кодерами (датчиками положения).
- Имеют лучший аналоговый частотный отклик.
- Имеют более прочный корпус.
- Сразу после включения «знают» положение штока, в отличии от кодеров, которым надо указывать постоянную ссылку на известное положение.
4. Преимущества над переменными векторными резистивными преобразователями (VRVT)
- LVDT датчики как правило более дешевы.
- Имеют меньший диаметр корпуса.
- Более прочные и не изнашиваются.
- Могут использоваться значительно дольше.
5. Преимущества над линейными емкостными датчиками
- LVDT датчики как правило более дешевы.
- Менее восприимчивы к внешним условиям эксплуатации.
- Значительно более прочные.
Особенности индуктивных датчиков перемещения LVDT
- Максимальная рабочая температура 600°C.
- Минимальная рабочая температура –220°C (для справки, температура жидкого азота -196°C, температура жидкого гелия -269°С).
- Могут работать при уровне радиации 100,000 рад.
- Могут работать при давлении 200Бар.
- Могут работать под водой, при этом вода может попадать внутрь датчика не причиняя ему вреда. Существует специальная серия подводных датчиков, которые могут без тех. осмотра работать под водов в течении 10-ти лет, работать под водой на глубине до 2,2км. Кабельные разъемы могут подсоединяться так же под водой.
Основные сферы применения LVDT датчиков
Промышленные измерительные системы
- Регулирующие вентили — везде, где существуют регулирующие вентили индуктивные датчики перемещения могут быть использованы для контроля положения штока вентиля. Особенно, где есть ответственные участки работы, например, в клапанах пара для турбин на электростанциях.
- Контроль положения шлюзов — погружные датчики перемещения подходят для измерения положения шлюзов в водохозяйственных и канализационных системах.
- Измерение зазора между валками.
Для поддержания равномерной толщины проката зазор между валками часто измеряется на обоих концах. - Контроль перемещения штоков вентилей на подводных нефте/газо проводах.
- Контроль работы гидравлических активаторов — измерение перемещения объекта, который передвигает активатор. Благодаря очен высокой износостойкости, данные LVDT датчики перемещения могут выдерживать миллионы циклов перемещения.
- Контроль положения/перемещения режущих инструментов, отрезающих рулонные материалы.
- Измеряет положение/смещение роликов, которые используется для выпрямления полосового проката перед штамповкой.
- Могут быть использованы для динамического измерения размеров (диаметров) рулонов продукта, например, инициировать сигнал к системе управления, когда рулон достигает максимального/минимального размера при наматывании/сматывании материала.
Станки
- Могут быть использованы в испытательных приспособлениях для измерения круглости, плоскостности и т.д. частей машин для анализа качества их изготовления.
- Могут быть использованы для оценки и контроля взаимного расположения компонентов деталей в сборке, когда требуется юстировка/подгонка размеров взаимного расположения деталей.
Авиация/космонавтика
- Могут быть использованы для оценки реакции привода на действие активатора. Например, преобразователь измеряет положение отклонения закрылков крыла самолета при техническом обслуживании. Тут очень важно измерить скорость срабатывания активатора после подачи на него управляющего сигнала, а так же скорость изменения положения закрылков.
- Анализ Ротора вертолета
Датчики LVDT используются на вертолетах, чтобы измерить угол наклона лопастей ротора. - Могут быть использованы для оценки смещения корпуса двигателя при нагревании.
- Могут быть использованы для измерения смещения (деформации) лопасти турбины при внешнем воздействии.
- Могут быть использованы для измерения отклонения диафрагмы сопла реактивного двигателя.
- Могут быть использованы для испытания крыльев самолетов для измерения их отклонения при нагрузке.
Строительство / Проектирование зданий и сооружений
- Могут быть использованы для измерения вибрации или деформации мостов при изменении трафика движения или порывов ветра.
- Могут быть использованы для измерения смещения грунта при строительстве, контроля оползней и насыпных дамб.
- Могут быть использованы при испытании крупногабаритных строительных конструкций, балок, пролетов моста и т. д. на силовую деформацию.
Автомобилестроение
- Могут быть использованы для контроля смещения корпуса двигателя при его испытаниях.
- Идеальным применением LVDT датчиков может быть тестирование компонентов подвески автотранспорта.
- Могут быть использованы для контроля изготовления прецизионных компонентов.
- Могут быть использованы для настройки компонентов двигателя, таких как дизельные форсунки.
- Могут быть использованы для тестирования сидений, дверей, педалей и ручек транспортных средств для моделирования продления их срока службы.
- Могут быть использованы для измерения профиля поверхности заготовки, например стекла или других площадных объектов.
Выработка энергии
- Могут быть использованы для измерения биения вала турбины.
- Могут быть использованы для контроля положения главного парового клапана, который регулирует поток пара в турбину. Клапан постоянно корректирует свое положения для поддержания постоянной скорости вращения турбины. LVDT датчики идеально подходят для работы в зоне высоких температур, грязи и постоянной вибрации.
- Могут быть использованы для контроля положения перепускного клапана. Когда откроется перепускной клапан, датчик может испытать температуру 200°C.
LVDT-датчики перемещения
Датчики перемещения находят применение во многих приложениях, и, хотя выбор устройств довольно широк, все же рассматриваемые в статье датчики компании Macro Sensors следует выделить из ряда подобных благодаря, как минимум, двум причинам. Во-первых, значительный динамический диапазон измеряемых перемещений, во-вторых — способность работать в самых жестких [[условиях эксплуатации]].
Аббревиатура LVDT образована от словосочетания Linear Variable Differential Transformer — линейный дифференциальный трансформатор с переменным коэффициентом передачи. LVDT-датчики — электромеханический преобразователь, преобразующий прямолинейное перемещение объекта, с которым он связан механически, в электрический сигнал. К отличительным особенностям рассматриваемых датчиков можно причислить очень большой динамический диапазон измеряемых перемещений (от десятков микрон до ±0,5 м) и возможность работать в самых жестких условиях эксплуатации. Первое следует из принципа действия, а второе — из конструктивного исполнения.
Существует довольно много импульсных датчиков перемещения, принцип действия которых основан на регистрации момента пересечения (с помощью магнитных или оптронных датчиков) движущимся объектом определенной метки. При наступлении указанного события на выходе датчика генерируется импульс. Подобные устройства по понятным причинам имеют не только ограниченный динамический диапазон измерений перемещений, но и увеличивают ошибку вычисления скорости и ускорения (первая и вторая производная от перемещения), что не всегда является приемлемым. Рассматриваемые в статье LVDT-датчики, в силу того что их выходной сигнал непрерывен, лишены отмеченных недостатков.
ПРИНЦИП ДЕЙСТВИЯ LVDT-ДАТЧИКА
На рисунке 1 схематично представлена конструкция LVDT-датчика, основными составляющими которого являются первичная и две вторичные обмотки (как правило, обмотки расположены на неподвижном сердечнике) и подвижное ядро. Первичная обмотка размещена симметрично между двумя идентичными вторичными обмотками. Катушки расположены на цельном термостабильном армированном полимере и заключены в герметичную оболочку, защищающую их от попадания влаги и агрессивных сред. Подвижное ядро, выполненное из высокопроницаемого магнитного материала, имеет цилиндрическую форму и свободно перемещается по внутренней полости датчика.

Электропитание первичной обмотки осуществляется переменным синусоидальным напряжением — типовое значение 3 В, 3 кГц. Выходным сигналом датчика является разность напряжений вторичных обмоток u8212 — дифференциальное напряжение. Обычно дифференциальное переменное напряжение преобразуется встроенным электронным модулем в сигнал постоянного тока.
На рисунке 2 проиллюстрирован принцип действия LVDT-датчика. Если подвижное ядро находится строго в центре (так называемая нулевая позиция), то магнитное поле, создаваемое первичной обмоткой Р, симметрично, следовательно магнитные потоки через вторичные обмотки S1 и S2 равны, а значит равны и ЭДС Е1 и Е2, индуцируемые в этих обмотках, а значит равно нулю дифференциальное напряжение. Если же подвижное ядро смещается относительно нулевого положения, то искажается симметрия магнитного поля — через одну из вторичных обмоток, в зависимости от положения ядра, проходит больший магнитный поток, нежели чем через другую (см. рис. 2). Следовательно, различаются и ЭДС, индуцируемые во вторичных обмотках, — чем больше магнитный поток, тем больше ЭДС.
На рисунке 3а показано, как изменяется амплитуда дифференциального выходного напряжения ЕOUT в зависимости от положения ядра внутри сердечника. Максим альное значение ЕOUT обычно достигает нескольких вольт. Угол сдвига фаз выходного напряжения ЕOUT относительно первичного напряжения остается постоянным вплоть до нулевой позиции, при пересечении которой сдвиг фаз изменяется на 180 градусов (см. рис. 3б). Сдвиг фазы можно использовать для определения направления движения относительно нулевой позиции при преобразовании сигнала переменного тока электронным модулем. Тогда выходной сигнал последнего будет иметь вид, как показано на рисунке 3в.
Из принципа действия и конструкции LVDT-датчика следует ряд очевидных преимуществ. Ниже мы перечислим основные из них

Отсутствие трущихся частей — одно из главных преимуществ LVDT-датчика. При использовании в штатном режиме нет механического контакта между подвижным ядром и катушками. Это преимущество особенно важно при измерениях малых перемещений, например при контроле вибраций.
Высокая чувствительность: отсутствие трения и физический принцип действия позволяют измерять очень малые перемещения ядра при хорошей повторяемости результатов измерений. Минимальная величина измерения ограничивается шумом и разрешением индицирующего прибора.
Практически неограниченная механическая износостойкость является следствием отсутствия трущихся частей. Из-за отсутствия трения и механических контактов между ядром и катушками нет факторов, оказывающих отрицательное влияние на механическую износостойкость. Следовательно, повышается надежность, что очень важно при использовании, например, в аэрокосмической промышленности и ядерной энергетике, а также в других приложениях, где надежность является ключевым параметром.
Повышенная защита от выбега за пределы трансформатора. Внутреннее отверстие большинства LVDT-датчиков открыто с обеих сторон, поэтому в случае «зашкаливания» (перемещения контролируемого объекта и жестко связанного с ним ядра за предусмотренные пределы) не происходит механического повреждения датчика — подвижное ядро попросту вылетает за пределы датчика, не нанося тому никаких повреждений. Эта неуязвимость очень хороша для применений в тензометрах и экстензометрах (приборы для измерения удлинений), которые используются в тестах на растяжение материалов.
Одно направление чувствительности. LVDT-датчик реагирует на перемещение ядра только в одном направлении и нечувствителен к перемещению в других направлениях. Эта особенность важна в приложениях, когда ядро передвигается не по идеальной прямой линии, а слегка «рыскает » при перемещении.
Разделение катушек и ядра. Катушки механически отделены от подвижного ядра, причем катушки помещены в герметичную капсулу. Это обстоятельство часто используется для применения LVDT в гидроприводах и сервоприводах.
Устойчивость к воздействию внешней среды. Материалы и конструкция, используемые в LVDT, антикоррозионные, износоустойчивые и прочные, что делает LVDT маловосприимчивым к негативным воздействиям внешней среды. Обмотки залиты эпоксидной смолой и почти невосприимчивы к влажности и осадкам, хорошо противостоят одиночным ударам и вибрациям. Внутренний экран из магнитопроницаемого материала минимизирует эффект внешних электромагнитных полей. И ядро и сердечник изготовлены из антикоррозионных материалов, также являющихся магнитными экранами. Для применения датчика во взрыво- и пожароопасных средах, а также в агрессивных средах датчик может быть изолирован от внешней среды посредством заключения в капсулу и «запечатан» с помощью сварки. Обычно LVDT-датчики работают в расширенном диапазоне рабочих температур и могут применяться и в криогенной технике, и при повышенных температурах и радиации, например в ядерных реакторах.
Повторяемость нулевой точки. Положение нулевой точки чрезвычайно стабильно и повторяемо даже при сверхшироких температурных диапазонах.
Хорошие динамические свойства. Отсутствие трения позволяет LVDT очень быстро изменять положение ядра. Динамический отклик ограничивается только массой ядра. Примеры применения LVDT-датчиков приведены в [1].
ЭЛЕКТРОННЫЙ МОДУЛЬ LVDT
Для электропитания LVDT-датчиков требуется синусоидальное переменное напряжение (обычно 3 В и 3 кГц), формирование которого является одной из задач электронного модуля. Другая функция модуля состоит в преобразовании и усилении дифференциального переменного напряжения в знакопеременный выходной сигнал с учетом направления движения (сдвиг фазы дифференциального напряжения от напряжения на первичной обмотке). Сегодня доступны различные электронные модули — от кристаллов до печатных плат. Производятся также индикаторы для работы с LVDT-датчиками, например [2].
Электропривод и компоненты промышленной автоматизации системы резервного питания

Преобразователи линейных перемещений: области применения
Устройства, которые представляют направление и величину перемещений подвижных частей механизмов в виде аналоговых и цифровых сигналов, пригодных для последующей обработки, получили название преобразователей линейных перемещений. Они служат высокоэффективному измерению пути, круговых движений, уровня наполнения, расстояний до объекта.
Номенклатура — тысячи моделей для автомобильной, станкостроительной, судостроительной, нефтегазовой промышленности. Велика роль этих устройств в системах вооружения и робототехники. ПЛП призваны автоматизировать работу машин самых разных типов. Вот некоторые примеры использования:
- управление шагом винта в ветряных генераторах;
- формовочное и металлопрокатное оборудование;
- затворы и шлюзы;
- транспортно-погрузочные механизмы;
- конвейеры;
- устройства деревообработки;
- машины для производства бетонных блоков;
- контроль уровней продуктов.
Современные станки и автомобили, сервосистемы роботов, научная и медицинская техника насыщены ПЛП различного класса точности и быстродействия. Больше всего контроль линейных и угловых перемещений востребован в машиностроительной отрасли (до 70% всех видов измерений).
Виды ПЛП и принципы работы
Потенциометрические
Оптико-электронные
Оптико-электронные преобразователи широко используются с середины прошлого века. Устаревшие лампы накаливания в таких приборах сейчас заменены лазерными излучателями, но суть процесса не меняется: оптические сигналы преобразуются в электрические. Наряду с оптическими не теряют актуальности ультразвуковые ПЛП, в которых фиксируются отраженные от объекта ультразвуковые волны.
Возможности традиционных бесконтактных оптических и звуковых преобразователей сильно ограничены условиями измерений. Они неэффективны в средах с низкой отражательной способностью, с высоким пыле-пено- парообразованием.
Микроимпульсные
Этих недостатков лишены микроимпульсные ПЛП, в которых используется магнитострикционный эффект. В таких приборах используют ферромагнитные материалы (обычно сплав железа и никеля).
Процесс измерения инициируется импульсом тока. Стержень из ферромагнетика действует подобно «волноводу», по которому начинает распространяться магнитное поле. В измеряемой точке располагается постоянный позиционный магнит, связанный с объектом измерения (например, с гидравлическим цилиндром). Этот магнит служит «курсором» текущей позиции. В месте его нахождения магнитные поля пересекаются и возникает пластическая деформация «волновода». Из этой позиции распространяется торсионный импульс, который улавливается и преобразуется в электрический ток. Время распространения торсионной волны (время импульсного отклика) прямо пропорционально расстоянию до постоянного магнита. Наиболее эффективны эти приборы на диапазонах от 150 мм до 4-х и более метров.
Бесконтактные преобразователи магнитострикционного типа
Получили распространение везде, где требуется длительный срок службы. Они нечувствительны к загрязнениям и влажности, типичным для многих производств. Серии бесконтактных ПЛП от лидирующих производителей (MTS Sensors Temposonics, Balluff Micropulse и др.) работают по 7-8 лет в тяжелых условиях с сохранением стабильных характеристик точности и повторяемости.
ПЛП ещё разделяют по конструктивному исполнению: стержневой (для гидроприводов), профильный, измерители уровня наполнения, а также серии, способные работать в агрессивных средах, во взрывоопасной атмосфере, в условиях пищевой и химической промышленности.
Основные характеристики и особенности интерфейсов ПЛП
При выборе преобразователя помимо его типа стоит выяснить следующие параметры:
- Диапазон измерения.
- Допустимая погрешность, разрешение. Минимальными погрешностями характеризуются устройства для станков с ЧПУ при изготовлении микросхем, в которых требуется точность на уровне микрометра. Для магнитострикционных представителей линейки Micropulse достигнута точность ±0,02% номинальной длины. Это превышает возможности ультразвуковых и радарных измерителей.
- Устойчивость к неблагоприятным факторам. Например, модель BTL5-A11-M0100-P-KA05 со степенью защиты IP67по IEC 60529 с герметичным корпусом способна давать устойчивые показания в жестких условиях, в диапазоне температур -40 -85°С, например, в прессах, формовочном оборудовании, портовых машинах.
На разрешение прибора и цену сильно влияет тип выхода/интерфейсного модуля:
- Аналоговый (по напряжению или току). Наиболее распространены токовые интерфейсы. Они стали стандартом ПЛП для многих отраслей, постольку относительно недороги и менее чувствительны к помехам.
- Импульсные. Сигналы от датчика усиливаются и передаются в цифровом виде без помех на значительные расстояния. В этой группе выделяют Р-интерфейсы и М-интерфейсы. Первые совместимы с котроллерами Siemens, Mitsubishi, Sigmatek, Parker, Esitron, WAGO и др. Вторые разработаны под определенные типы контроллеров.
- Синхронно-последовательные (SSI). Сигнал о положении позиционера посылается на контроллер в виде последовательности данных. Такие ПЛП подключаются непосредственно к плате управления через SSI-интерфейс. Они оптимальны в качестве сенсоров обратной связи для динамичных задач регулирования при работе в неблагоприятных условиях.
В ассортименте компании «Автоматика» сделан акцент на современных типах преобразователей, которые соответствуют требованиям Ростехнадзора, европейских и российских стандартов. Наши специалисты окажут помощь в выборе и покупке нужной модели, проведут технические консультации, организуют быстрые поставки в Екатеринбурге. Телефон для справок: +7 (343) 384-55-45.